




























Note
Action
xx1300000485
Secure the carrier with the M4x10 screw.
Note
The screw is located at the bottom of the
carrier.
Tip
The attachment screw securing the carrier
may be difficult to fit. Make sure the carrier
is level and completely pressed against the
bottom.
4
Torx pan head screw: M6x16 A4-80
Secure the cable bracket with its attach-
ment screws.
5
Tightening torque: standard torque 10 Nm
(
)..
xx1300000484
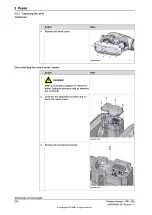
Connecting the axis-6 motor cables
Note
Action
Connect the motor cables.
1
Connect in accordance with the markings
on the connectors.
Tightening torque: 1 Nm
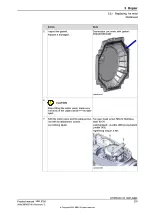
Position the power connector to the bracket
with a screw.
Note
The purpose of the screw is to secure the
mating of the connectors and the position-
ing of the connector in the connection box.
It is normal that the connector can be
moved back and forth after the screw has
been tightened according to the torque
specification and, in some connection
boxes, that the screw is not even fully inser-
ted when it bottoms.
2
xx2200001731
Continues on next page
Product manual - IRB 6720
281
3HAC085697-001 Revision: C
© Copyright 2023 ABB. All rights reserved.
5 Repair
5.5.1 Replacing the wrist
Continued
Summary of Contents for OmniCore IRB 6720
Page 1: ...ROBOTICS Product manual IRB 6720...
Page 8: ...This page is intentionally left blank...
Page 14: ...This page is intentionally left blank...
Page 54: ...This page is intentionally left blank...
Page 184: ...This page is intentionally left blank...
Page 584: ...This page is intentionally left blank...
Page 608: ...This page is intentionally left blank...
Page 614: ...This page is intentionally left blank...
Page 639: ......





















































