





























3.4 Command Option Attachable-type FT82 SERVOPACKs with INDEXER Modules
3.4.3 Troubleshooting Alarms
3
Maintenance
3-171
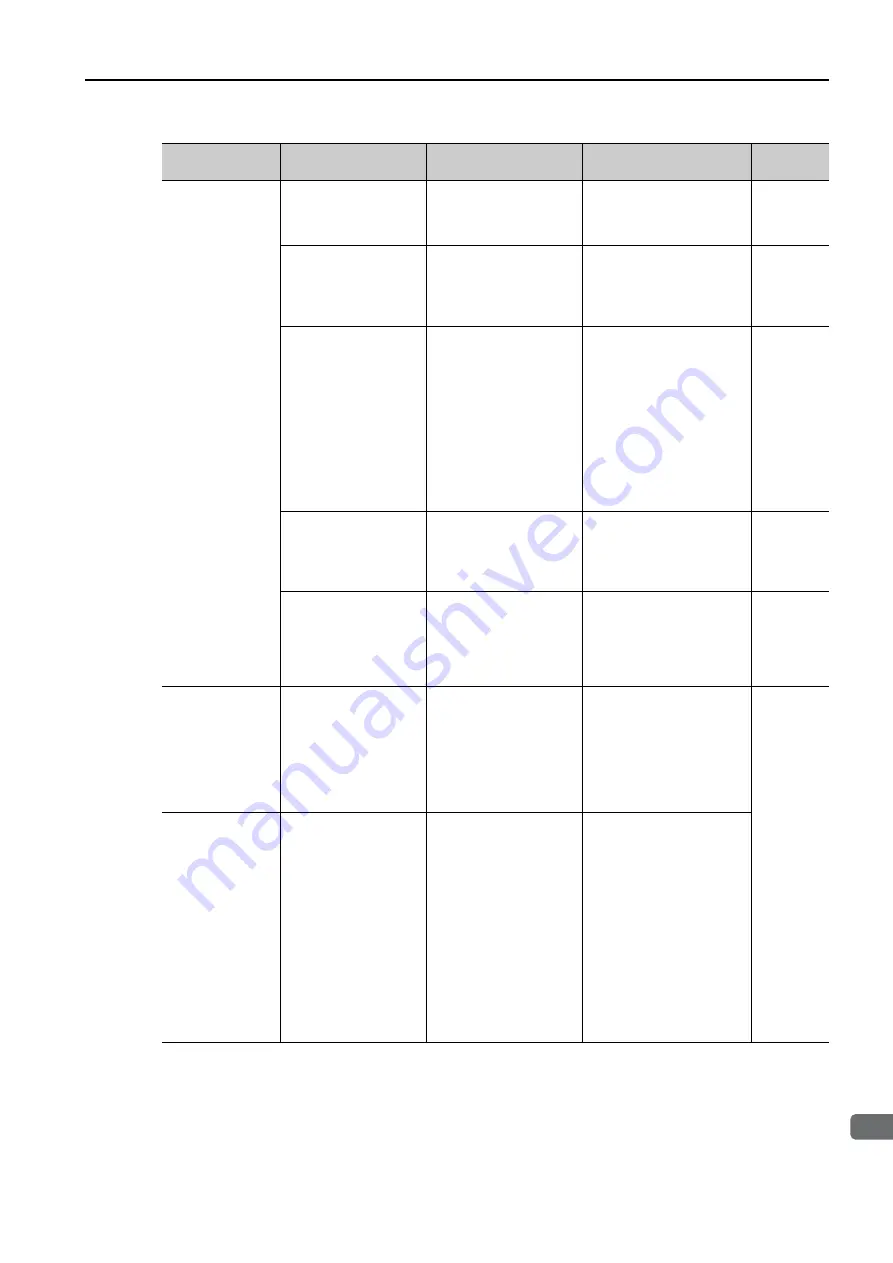
A.d00:
Position Devia-
tion Overflow
(The setting of
Pn520 (Exces-
sive Position
Deviation Alarm
Level) was
exceeded by the
position devia-
tion while the
servo was ON.)
The Servomotor U, V,
and W wiring is not
correct.
Check the wiring of the
Servomotor’s Main Cir-
cuit Cables.
Make sure that there are
no faulty contacts in the
wiring for the Servomotor
and encoder.
–
The position com-
mand speed is too
fast.
Reduce the position
command speed and
try operating the SER-
VOPACK.
Reduce the position refer-
ence speed or the refer-
ence acceleration rate, or
reconsider the electronic
gear ratio.
*1
The acceleration of
the position reference
is too high.
Reduce the reference
acceleration and try
operating the SERVO-
PACK.
Reduce the acceleration
of the position reference
with one of the following
methods.
•
Reduce the accelera-
tion rate (ACC) and
deceleration rate (DEC)
in the program table.
•
Reduce the settings of
PnB29 (Acceleration
Rate) and PnB2B
(Deceleration Rate).
−
The setting of Pn520
(Excessive Position
Deviation Alarm Level)
is too low for the
operating conditions.
Check Pn520 (Exces-
sive Position Deviation
Alarm Level) to see if it
is set to an appropriate
value.
Optimize the setting of
Pn520.
*1
A failure occurred in
the SERVOPACK.
–
Turn the power supply to
the SERVOPACK OFF and
ON again. If an alarm still
occurs, the SERVOPACK
may be faulty. Replace the
SERVOPACK.
–
A.d01:
Position Devia-
tion Overflow
Alarm at Servo
ON
The servo was turned
ON after the position
deviation exceeded
the setting of Pn526
(Excessive Position
Deviation Alarm Level
at Servo ON) while the
servo was OFF.
Check the position
deviation while the
servo is OFF.
Optimize the setting of
Pn526 (Excessive Position
Deviation Alarm Level at
Servo ON).
*1
A.d02:
Position Devia-
tion Overflow
Alarm for Speed
Limit at Servo ON
If position deviation
remains in the devia-
tion counter, the set-
ting of Pn529 or
Pn584 (Speed Limit
Level at Servo ON)
limits the speed when
the servo is turned
ON. This alarm occurs
if a position reference
is input and the set-
ting of Pn520 (Exces-
sive Position Deviation
Alarm Level) is
exceeded.
–
Optimize the setting of
Pn520 (Excessive Position
Deviation Alarm Level). Or,
adjust the setting of
Pn529 or Pn584 (Speed
Limit Level at Servo ON).
Continued on next page.
Continued from previous page.
Alarm Number:
Alarm Name
Possible Cause
Confirmation
Correction
Reference







































































