





























3.2 FT82 SERVOPACK with MECHATROLINK-II Communications References
3.2.7 Troubleshooting Based on the Operation and Conditions of the Servomotor
3
Maintenance
3-89
3.2.7
Troubleshooting Based on the Operation and Conditions
of the Servomotor
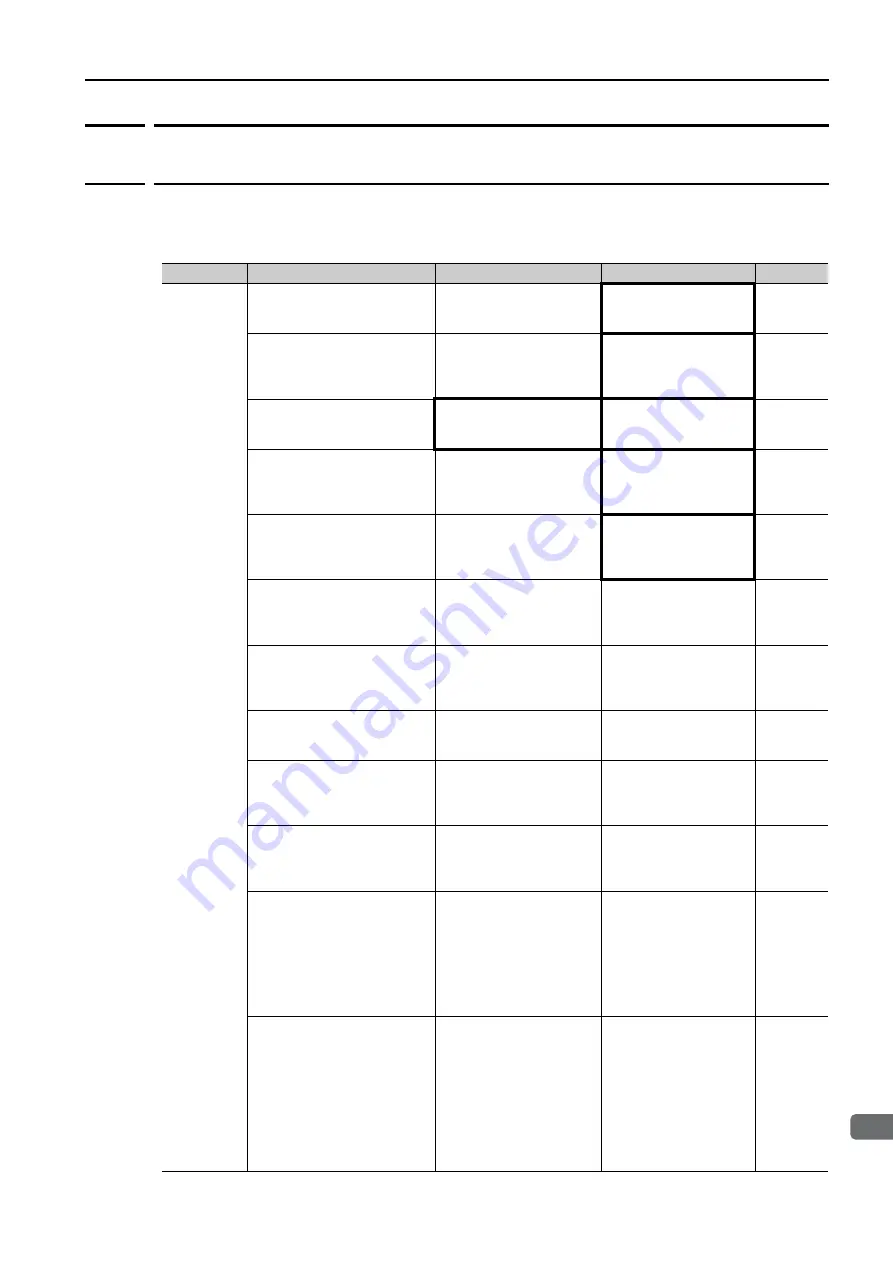
This section provides troubleshooting based on the operation and conditions of the Servomo-
tor, including causes and corrections.
Turn OFF the Servo System before troubleshooting the items shown in bold lines in the table.
Problem
Possible Cause
Confirmation
Correction
Reference
Servomotor
Does Not
Start
The control power supply is
not turned ON.
Measure the voltage
between control power
supply terminals.
Correct the wiring so
that the control power
supply is turned ON.
–
The main circuit power sup-
ply is not turned ON.
Measure the voltage
across the main circuit
power input terminals.
Correct the wiring so
that the main circuit
power supply is turned
ON.
–
The I/O signal connector
(CN1) pins are not wired cor-
rectly or are disconnected.
Check the wiring condi-
tion of the I/O signal con-
nector (CN1) pins.
Correct the wiring of
the I/O signal connec-
tor (CN1) pins.
*
The wiring for the Servomo-
tor Main Circuit Cables or
Encoder Cable is discon-
nected.
Check the wiring condi-
tions.
Wire the cable cor-
rectly.
–
There is an overload on the
Servomotor.
Operate the Servomotor
with no load and check
the load status.
Reduce the load or
replace the Servomo-
tor with a Servomotor
with a larger capacity.
–
The type of encoder that is
being used does not agree
with the setting of Pn002 =
n.
X
(Encoder Usage).
Check the type of the
encoder that is being
used and the setting of
Pn002 = n.
X
.
Set Pn002 = n.
X
according to the type of
the encoder that is
being used.
*
There is a mistake in the
input signal allocations
(Pn50A, Pn50B, Pn511, and
Pn516).
Check the input signal
allocations (Pn50A,
Pn50B, Pn511, and
Pn516).
Correctly allocate the
input signals (Pn50A,
Pn50B, Pn511, and
Pn516).
*
The SV_ON command was
not sent.
Check the commands
sent from the host con-
troller.
Send the SV_ON com-
mand from the host
controller.
–
The SENS_ON (Turn ON
Sensor) command was not
sent.
Check the commands
sent from the host con-
troller.
Send the commands to
the SERVOPACK in the
correct sequence.
–
The P-OT (Forward Drive
Prohibit) or N-OT (Reverse
Drive Prohibit) signal is still
OFF.
Check the P-OT and N-
OT signals.
Turn ON the P-OT and
N-OT signals.
*
The safety input signals
(/HWBB1 or /HWBB2) were
not turned ON.
Check the /HWBB1 and
/HWBB2 input signals.
Turn ON the /HWBB1
and /HWBB2 input sig-
nals. If you are not
using the safety func-
tion, connect the Safety
Jumper Connector
(provided as an acces-
sory) to CN8.
*
The FSTP (Forced Stop
Input) signal is still OFF.
Check the FSTP signal.
•
Turn ON the FSTP
signal.
•
If you will not use the
function to force the
motor to stop, set
Pn516 = n.
X
(FSTP (Forced Stop
Input) Signal Alloca-
tion) to disable the
signal.
*
Continued on next page.







































































