Start
(M)
7-bit Device Address
(M)
Write
(M)
Slave
Ack
(S)
8-bit Register Address
(M)
Slave
Ack
(S)
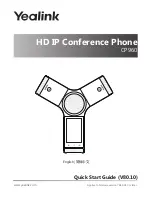
SDA
SCL
7-bit Device Address
(M)
Read
(M)
Slave
Ack
(S)
DA(6)
DA(0)
RA(7)
RA(0)
DA(6)
DA(0)
D(7)
D(0)
8-bit Register Data
(S)
Stop
(M)
Master
No Ack
(M)
Repeat
Start
(M)
(M) => SDA Controlled by Master
(S) => SDA Controlled by Slave
DA(6)
DA(0)
RA(7)
RA(0)
D(7)
D(0)
Start
(M)
7-bit Device Address
(M)
Write
(M)
Slave
Ack
(S)
8-bit Register Address
(M)
Slave
Ack
(S)
8-bit Register Data
(M)
Stop
(M)
Slave
Ack
(S)
SDA
SCL
(M) => SDA Controlled by Master
(S) => SDA Controlled by Slave
Control Interfaces
Once the SDA line has settled, the SCL line is brought HIGH, then LOW. This pulse on the SCL line
clocks the SDA bit into the receiver’s shift register.
The I
2
C bus is bidirectional: the SDA line is used both for transmitting and receiving data. When a master
reads from a slave, the slave drives the data line; when a master sends to a slave, the master drives the
data line.
Most of the time the bus is idle, no communication is taking place, and both lines are HIGH. When
communication is taking place, the bus is active. Only master devices can start communication on the bus.
Normally, the data line is only allowed to change state while the clock line is LOW. If the data line changes
state while the clock line is HIGH, it is either a START condition or its counterpart, a STOP condition. A
START condition is when the clock line is HIGH and the data line goes from HIGH to LOW. A STOP
condition is when the clock line is HIGH and the data line goes from LOW to HIGH.
After the master issues a START condition, it sends a byte that selects the slave device for
communication. This byte is called the address byte. Each device on an I
2
C bus has a unique 7-bit
address to which it responds. (Slaves can also have 10-bit addresses; see the I
2
C specification for
details.) The master sends an address in the address byte, together with a bit that indicates whether it
wishes to read from or write to the slave device.
Every byte transmitted on the I
2
C bus, whether it is address or data, is acknowledged with an
acknowledge bit. When a master has finished sending a byte (eight data bits) to a slave, it stops driving
SDA and waits for the slave to acknowledge the byte. The slave acknowledges the byte by pulling SDA
LOW. The master then sends a clock pulse to clock the acknowledge bit. Similarly, when a master has
finished reading a byte, it pulls SDA LOW to acknowledge this to the slave. It then sends a clock pulse to
clock the bit. (Remember that the master always drives the clock line.)
A not-acknowledge is performed by simply leaving SDA HIGH during an acknowledge cycle. If a device is
not present on the bus, and the master attempts to address it, it will receive a not
−
acknowledge because
no device is present at that address to pull the line LOW.
When a master has finished communicating with a slave, it may issue a STOP condition. When a STOP
condition is issued, the bus becomes idle again. A master may also issue another START condition. When
a START condition is issued while the bus is active, it is called a repeated START condition.
The TLV320DAC3203 can also respond to and acknowledge a General Call, which consists of the master
issuing a command with a slave address byte of 00H. This feature is disabled by default, but can be
enabled via Page 0, Register 34, Bit D(5).
Figure 2-48. I
2
C Write
Figure 2-49. I
2
C Read
67
SLAU434 – May 2012
TLV320DAC3203 Application
Copyright © 2012, Texas Instruments Incorporated