





























Setpoint channel and closed-loop control
7.4 Vector speed/torque control with/without encoder
Drive converter cabinet units
Operating Instructions, 07/07, A5E00288214A
281
When correctly adapted, when accelerating, the speed controller only has to compensate
disturbance variables in its control loop. This is achieved with a relatively minor controlled
variable change at the controller output. Speed-setpoint changes, on the other hand, are
carried out without involving the speed controller and are, therefore, achieved more quickly.
The effect of the pre-control variable can be adapted according to the application using the
weighting factor p1496. For p1496 = 100%, pre-control is calculated according to the motor
and load moment of inertia (p0341, p0342). A balancing filter is used automatically to
prevent the speed controller acting against the injected torque setpoint. The time constant of
the balancing filter corresponds to the equivalent delay time of the speed control loop. Speed
controller pre-control is correctly set (p1496 = 100%, calibration using p0342) if the I
component of the speed controller (r1482) does not change while ramping-up or ramping-
down in the range n > 20% x p0310. Thus, pre-control allows a new speed setpoint to be
approached without overshoot (prerequisite: torque limiting does switch in and the moment
of inertia remains constant).
If the speed controller is pre-controlled by means of injection, the speed setpoint (r0062) is
delayed with the same smoothing time (p1442 or p1452) as the actual value (r1445). This
ensures that no target/actual difference (r0064) occurs at the controller input during
acceleration, which would be attributable solely to the signal propagation time.
When speed pre-control is activated, the speed setpoint must be specified continuously or
without a higher interference level (avoids sudden torque changes). An appropriate signal
can be generated by smoothing the speed setpoint or activating ramp-function generator
rounding p1130 – p1131.
The startup time r0345 (T
startup
) is a measure for the total moment of inertia J of the machine
and describes the time during which the unloaded drive can be accelerated with the rated
motor torque r0333 (M
mot,rated
) from standstill to the rated motor speed p0311 (n
mot,rated
).
r0435 = T
startup
= J x (2 x π x n
mot,rated
) / (60 x M
mot, rated
) = p0341 x p0342 x (2 x π x p0311) /
(60 x r0333)
If these supplementary conditions are in line with the application, the startup time can be
used as the lowest value for the ramp-up or ramp-down time.
Note
The ramp-up and ramp-down times (p1120; p1121) of the ramp-function generator in the
setpoint channel should be set accordingly so that the motor speed can track the setpoint
during acceleration and braking. This will optimize the function of speed controller pre-
control.
Acceleration pre-control using a connector input (p1495) is activated by the parameter
settings p1400.2 = 1 and p1400.3 = 0. p1428 (dead time) and p1429 (time constant) can be
set for balancing purposes.
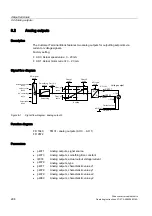
Function diagram
FP 6031
Pre-control balancing reference/acceleration model
Содержание SINAMICS S150
Страница 2: ......
Страница 6: ...Preface Drive converter cabinet units 6 Operating Instructions 07 07 A5E00288214A ...
Страница 14: ...Table of contents Drive converter cabinet units 14 Operating Instructions 07 07 A5E00288214A ...
Страница 28: ...Device overview 2 5 Type plate Drive converter cabinet units 28 Operating Instructions 07 07 A5E00288214A ...
Страница 519: ......
Страница 520: ...Siemens AG Automation and Drives Large Drives P O Box 4743 90025 NÜRNBERG GERMANY www ad siemens com A5E00288214A ...







































































