





























3-10
3. Repeat steps 1 and 2 above as required.
4. Save the data in memory by pressing the DATA Key.
5. With this, the parameter setting operation is complete. Pressing the DATA Key at this point will bring
back the parameter number display.
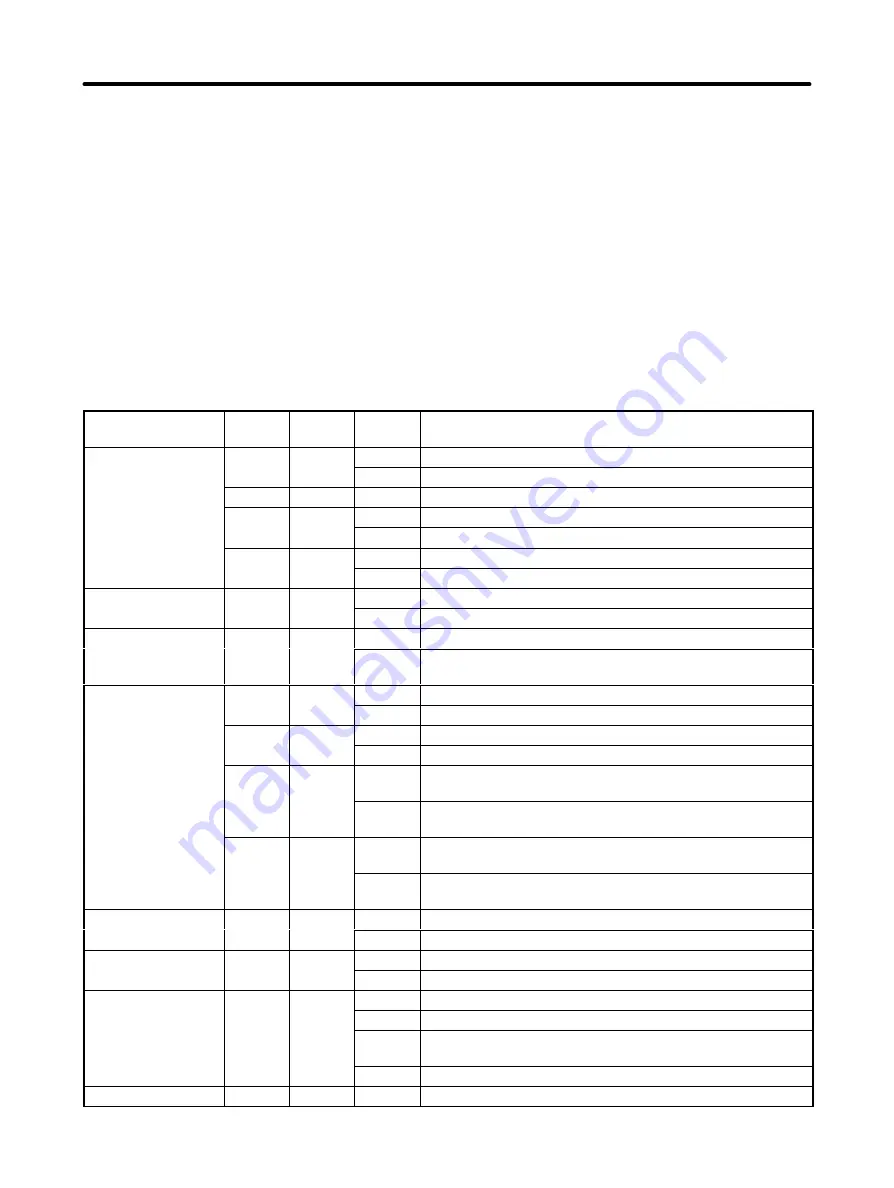
3-4-2 Setup Parameter Contents
H
Setup Parameter No. 1 (Cn-01)
Item
Bit no.
Factory
setting
Setting
Explanation
Sequence input sig-
l
i hi
0
0
0
Servo turned ON or OFF by Run command (externally input).
q
g
nal switching
1
Servo always ON.
1
0
---
Not used.
2
1
0
Enables forward drive prohibit input (POT).
1
Permits always-forward drive.
3
1
0
Enables reverse drive prohibit input (NOT).
1
Permits always -reverse drive.
Sequence output sig-
l
i hi
4
0
0
Takes TGON/CLIMT signal as motor rotation detection output.
q
g
nal switching
1
Takes TGON/CLIMT signal as current limit detection output.
Processing at time of
f
5 (see
1)
1
0
Servo alarm set at time of recovery from momentary stop.
g
recovery from mo-
mentary stop
(
note 1)
1
Servo alarm automatically cleared at time of recovery from mo-
mentary stop.
Abnormal stop
6
1
0
Motor stopped by dynamic brake.
1
Motor stopped with free run.
7 (see
2)
1
0
Dynamic brake OFF after motor stopped.
(
note 2)
1
Dynamic brake ON after motor stopped.
8
0
0
Method for stopping when over-travel occurs depends on bit
no. 6 setting.
1
When over-travel occurs, motor is stopped at the torque set by
user parameter Cn-06 (emergency stop torque).
9
0
0
When over-travel occurs, motor comes to deceleration stop and
servo turns OFF.
1
When over-travel occurs, motor comes to deceleration stop and
position is locked. (see note 6)
Deviation counter
i h S
OFF
A
0
0
Clear counter for alarms occurring while Servo is OFF
with Servo OFF
1
Do not clear counter for alarms occurring while Servo is OFF
P control switch
l
i
b
1
0
Switch control according to bits C and d.
selection
1
Do not switch
P control switch
di i
d, C
(
0, 0
0, 0
The torque command value (Cn-0C) is taken as the condition.
conditions
,
(see
note 3)
,
0, 1
The speed command value (Cn-0d) is taken as the condition.
note 3)
1, 0
The acceleration command value (Cn-0E) is taken as the
condition.
1, 1
The deviation pulse (Cn-0F) is taken as the condition.
E
0
---
Not used.
Operation
Chapter 3
Содержание OMNUC 88D-UP20HA
Страница 11: ...Warning Labels for Models Conforming to EC Directives Warning label 1 Warning label 2...
Страница 31: ...2 8 D R88A PR03U 54 57 5 15 6 9 System Design and Installation Chapter 2...
Страница 188: ...5 53 H Mounting Dimensions D R88A TK01U D R88A TK02U Two M5 Three M5 Specifications Chapter 5...







































































