





























3-39
Increasing the feed-forward amount to much will cause excessive overshooting.
The feed-forward amount is not sent through the deviation counter, but is applied directly to the speed
loop. The differential of the deviation counter is thus not applied, causing a faster response when the
load response is delayed from the commands.
Be sure that the position loop is completely adjusted and that the speed loop is operating safely before
adjusting the feed-forward amount.
Increasing the feed-forward amount too much will cause the speed command to oscillate, resulting in
abnormal noise from the motor. Increase the feed-forward amount slowly from 0%, adjusting it so that
the positioning completion output is not adversely affected (e.g., turn repeatedly ON and OFF) and so
that the speed does not overshoot.
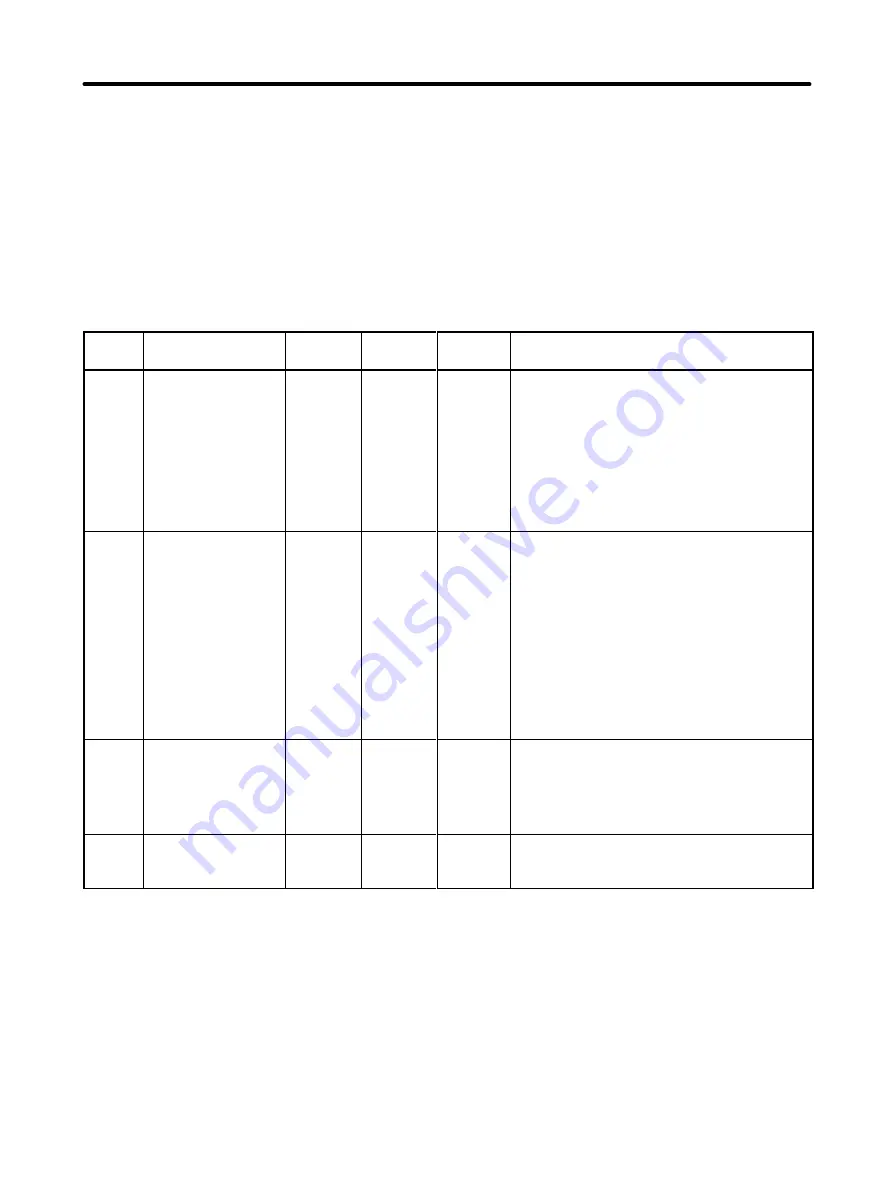
PRM
No.
Parameter name
Factory
setting
Unit
Setting
range
Explanation
Cn-1E
Deviation counter
overflow level
1,024
×
256
com-
mands
1 to
32,767
Sets the level for detection of deviation
counter overflow.
The residual pulses in the deviation counter
will equal the command pulse frequency
divided by the position loop gain. Divide
this value by 256, add a reasonable
amount of leeway, and set the deviation
counter overflow level to the resulting val-
ue.
Cn-26
Position command
acceleration/decel-
eration time
constant
0
×
0.1 ms
0 to 640
Sets the time constant for smoothing (posi-
tion command soft start function).
Even if the position command pulses are
input in steps, the time constant set here
will be used to accelerate/decelerate the
motor.
The same time will be used for both accel-
eration and deceleration.
Set this parameter to 0 when using a posi-
tion controller that has an acceleration/de-
celeration function.
Cn-27
Feed-forward com-
mand filter
0
×
0.1 ms
0 to 640
Sets the feed-forward command filter.
This parameters acts as a low-pass filter to
prevent the feed-forward amount from be-
ing applied too quickly when position com-
mand pulses are input in steps.
Cn-28
Compensating gain
(HA/LA/V/W Mod-
els)
0
---
0 to 100
Decreases the speed loop gain by the set
value when a large torque is output due to
acceleration, deceleration, etc.
D
Compensating Gain
Increasing the compensating gain will reduce motor vibration and will also enable setting a larger speed
loop gain, allowing faster positioning. Increasing the compensating gain too much will delay following
accelerations/decelerations.
Adjust the compensating gain only after adjusting the speed loop gain (Cn-04) and the speed loop in-
tegration constant (Cn-05).
Depending on the values of the speed loop gain (Cn-04) and the speed loop integration constant
(Cn-05), the upper limit of the compensating gain may be 100 or less. An error will occur if the compen-
sating gain is set too high.
Operation
Chapter 3
Содержание OMNUC 88D-UP20HA
Страница 11: ...Warning Labels for Models Conforming to EC Directives Warning label 1 Warning label 2...
Страница 31: ...2 8 D R88A PR03U 54 57 5 15 6 9 System Design and Installation Chapter 2...
Страница 188: ...5 53 H Mounting Dimensions D R88A TK01U D R88A TK02U Two M5 Three M5 Specifications Chapter 5...







































































