





























Digitax HD M753 Control User Guide
119
Issue Number: 3
A velocity feed forward will be calculated for the position controller.
On each interpolator time period, a value is read from the target_position
object. The correct number of data points for linear interpolation is stored
internally. When a new target position is loaded in, the oldest position
command in the data set will be discarded.
9.22.1
0x607A Target_position
This object indicates the commanded position that the drive should
move to in cyclic sync position mode using the current settings of motion
control parameters such as velocity, acceleration, deceleration, motion
profile type etc. The value of this object is given in user-defined position
units.
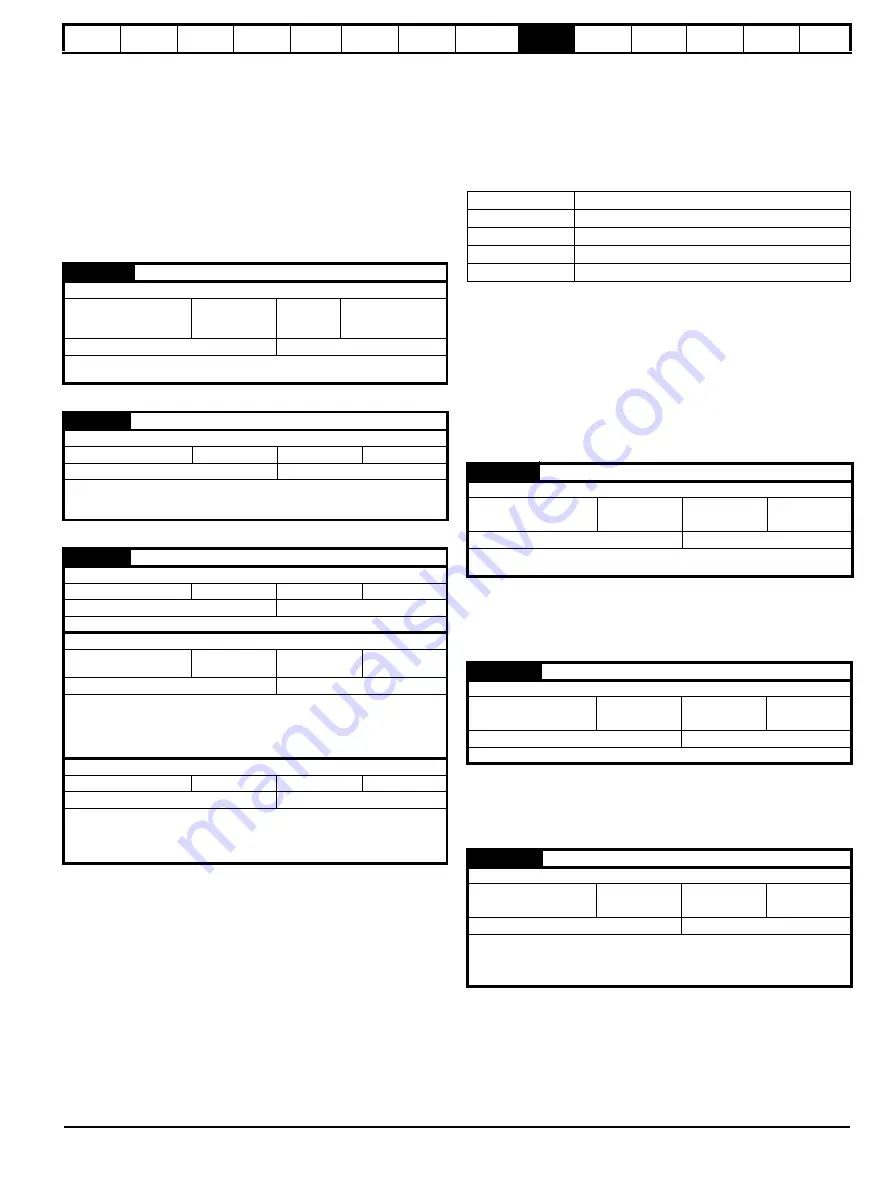
Table 9-98 Target position
Table 9-99 Interpolation sub-mode select
Table 9-100 Interpolation time period
9.23
Cyclic Synchronous Velocity Mode
Cyclic Synchronous Velocity mode is supported in RFC-A and RFC-S
operating modes.
This profile will operate on the control loop cycle time, using the drive's
AMC speed reference (which is read by the drive every 250
μ
s, and the
AMC will be configured to run in velocity mode).
The following objects are supported:
The target_velocity object will be re-read every new profile cycle
(as specified by the interpolation_time_period. This velocity demand will
be scaled appropriately and written to the drive; interpolation will be
used to generate additional intermediate values if the
interpolation_time_period is greater than the interval at which the drive
will read the hard speed reference parameter.
9.23.1
Velocity actual value
This object provides the facility to read the actual velocity feedback
value.
Table 9-101 Velocity actual value
9.23.2
Target velocity
This object is used to specify the target velocity value. The value is given
in user-defined units.
Table 9-102 Target velocity
9.23.3
Velocity offset
This object is used to specify the velocity offset value. The value is given
in user-defined units.
Table 9-103 Velocity offset
0x607A
Target position
Sub-index 0
Access: RW
Range:
0x8000000 to
0x7FFFFFFF
Size:
4 bytes
Unit: User-defined
position units
Default:
N/A
Type: DINT
Description:
Indicates the command positions that the drive should move to in
cyclic sync position mode.
0x60C0
Interpolation sub-mode select
Sub-index 0
Access: RW
Range: 0 to 0
Size: 2 bytes
Unit: N/A
Default:
0 (Linear Interpolation)
Type: INT
Description:
This will specify the interpolation type. The values have the
following meanings:
0 = Linear Interpolation.
0x60C2
Interpolation time period
Sub-index 0
Access: RO
Range: N/A
Size: 1 byte
Unit: N/A
Default: 2
Type:
USINT
Description: The number of the last sub-index in this object.
Sub-index 1
Access: RW
Range: 0 to 255 Size: 1 byte
Unit: (sub-index
2)
Default: 250
Type:
USINT
Description:
The number of time units between interpolator restarts. A time unit
is defined by sub-index 2. The interpolator time period value will be
checked to ensure that it is valid. Valid values are 250 µs, 500 µs or
any multiple of 1 ms. Selecting other values will result in an error
indication.
Sub-index 2
Access: RW
Range: -6 to 0
Size: 1 byte
Unit: N/A
Default:
-6 (a time unit of 1 µs)
Type: SINT
Description:
This specifies the time unit for the interpolation time period.
Sub-index 2 specifies the unit exponent. The time unit, therefore,
is 10
(sub-index 2)
. The range of values allows for the shortest time
unit to be 1 µs, and the longest to be 1s.
Index
Name
606C
Velocity actual value
60B1
Velocity Offset
60C2
interpolation_time_period
60FF
target_velocity
0x606C
Velocity actual value
Sub-index 0
Access: RO
Range: -2
31
to
+2
31
-1
Size: 4 bytes
Unit: N/A
Default:
0
Type: DINT
Description:
Indicates the actual velocity feedback value.
Value is given in user-defined velocity unit.
0x60FF
Target velocity
Sub-index 0
Access: RW
Range: -2
31
to
+2
31
-1
Size: 4 bytes
Unit: N/A
Default:
0
Type: DINT
Description:
Specifies the target velocity value in user-defined velocity units.
0x60B1
Velocity offset
Sub-index 0
Access: RW
Range: -2
31
to
+2
31
-1
Size: 4 bytes
Unit: N/A
Default:
0
Type: DINT
Description:
Specifies the velocity offset value in user-defined velocity units.
The target velocity value is added to the velocity offset value to
give the final
velocity reference value.
Содержание Digitax HD M753 EtherCAT
Страница 261: ......
Страница 262: ...0478 0461 03...