





























Digitax HD M753 Control User Guide
109
Issue Number: 3
9.18.8
0x6061 Modes_of_operation_display
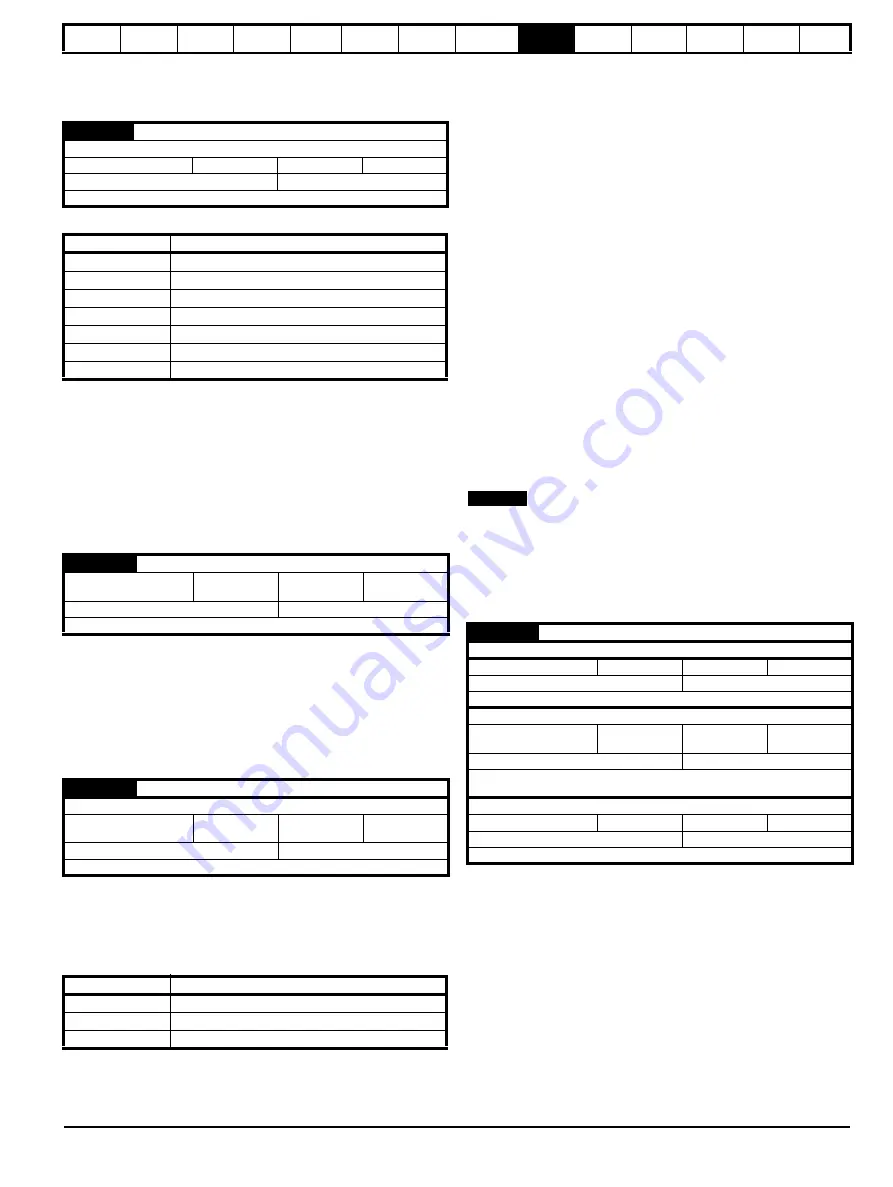
This read only object indicates the active mode of operation.
Table 9-50 Modes_of_operation_display
Table 9-51 Modes_of_operation_display values
9.18.9
0x6084 Profile deceleration
This object is used to configure the deceleration rate used to stop the
motor when the quick stop function is activated and the quick stop code
object (0x605A) is set to 1 or 5. This object is also used for shutdown
when shutdown option code (0x605B) is set to 1, and for disable
operation when disable operation option code (0x605C) is set to 1. It is
also used if the fault reaction code object (0x605E) is 1. The value is
given in user defined acceleration units. This object will not be used for
vl velocity mode. This object will not be used for vl velocity mode.
Table 9-52 Profile deceleration
9.18.10 0x6085 Quick_stop_deceleration
This object is used to configure the deceleration rate used to stop the
motor when the quick stop function is activated and the quick stop code
object (0x605A) is set to 2 or 6. The quick stop deceleration is also used
if the fault reaction code object (0x605E) is 2. The value is given in user-
defined acceleration units. This object will not be used for vl velocity
mode.
Table 9-53 Quick_stop_deceleration
9.18.11 Profile units
The EtherCAT interface implementation provides a means to convert
profile units into position controller and drive units. All scaling values are
standard profile objects. The following objects are supported:
Table 9-54 Supported profile units
The initial value of the feed constant object (0x6092) shall be calculated
from the normalization turns parameter of the associated encoder
channel if the default values have not been modified.
If either value is non default the values will be taken as is.
For positions, the scaling control will include a feed constant, a gear ratio
and an encoder resolution. These values will be combined together to
scale the drive position (i.e. encoder increments) to position in user-
defined unit by the following formula.
It will be possible to change these values non-cyclically (i.e. using
SDOs), It will not, however, be possible to change these values cyclically
(i.e. by mapping PDOs to them).
The position encoder resolution object 0x608F will be read-only and its
value will be derived from drive parameter values. The numerator of
0x608F will be derived from the normalization turns parameter of the
associated encoder channel. The denominator of 608F will be always 1.
The user-defined position and velocity values will be handled in signed
32-bit values. The scaled position will rollover the boundary if it is too
large.
When the gear ratio or the feed constant is applied, the combination of
will be calculated and simplified.
The result will be applied to the AMC slave user unit’s ratio and its
inverse value will be put in the AMC output user unit’s ratio. To prevent
the overflow risk of AMC ratio parameters, before being applied, the size
will be checked to make sure the numerator and the denominator of the
combined results are within 1 to 2
31
-1 range. If not, the module will trip
‘Scaling failure’ and the AMC scaling ratios will stay previous value.
The Gear ratio object will not be used for Homing mode.
9.18.12 0x608F Position_encoder_resolution
This read only object indicates the configured encoder increments per
number of motor revolutions.
The information is read from the drive's encoder configuration.
Table 9-55 Position_encoder_resolution
0x6061
Modes_of_operation_display
Sub-index 0
Access: RO
Range: 0 to 10
Size: 1 byte
Unit: N/A
Default: N/A
Type:
SINT
Description:
Used to provide the active mode of operation.
Value
Definition
0
No mode change
2
vl velocity mode
6
Homing mode
7
Interpolated Position mode
8
Cyclic Sync Position mode
9
Cyclic Sync Velocity mode
10
Cyclic Sync Torque mode
0x6084
Profile deceleration
Access: RW
Range:0 to
65536
Size: 4 bytes
Unit: N/A
Default: 65536
Type:
UDINT
Description:
Provides the deceleration ramp for the positioning modes
0x6085
Quick_stop_deceleration
Sub-index 0
Access: RW
Range:Range:0
to 65536
Size: 4 bytes
Unit: N/A
Default: 65536
Type:
UDINT
Description:
Quick stop function for the positioning related modes.
Index
Name
0x608F
position_encoder_resolution
0x6091
gear_ratio
0x6092
feed_constant
0x608F
Position_encoder_resolution
Sub-index 0
Access: RO
Range: N/A
Size: 1 byte
Unit: N/A
Default: 2
Type:
USINT
Description:
Sub-index 1
Access: RO
Range: 0 to
0xFFFFFFFF
Size: 4 bytes
Unit: N/A
Default: 65536
Type:
UDINT
Description:
Encoder increments, derived from the normalization turns of the
associate encoder channel
Sub-index 2
Access: RO
Range: N/A
Size: 4 bytes
Unit: N/A
Default: 1
Type:
UDINT
Description:
Motor revolutions, always 1
user defined unit position
drive position feed constant
position encoder resolution gear ratio
-----------------------------------------------------------------------------------------------------
=
feed constant
position encoder resolution gear ration
--------------------------------------------------------------------------------------------------------
NOTE
Содержание Digitax HD M753 EtherCAT
Страница 261: ......
Страница 262: ...0478 0461 03...