





























Operation
26
P/N 113564 Rev. 2
Twister II Robot User’s Manual
Caliper Life Sciences, Inc.
Configure the Robot Software
You must set the simulation mode and the Comm port for each
robot in the system. These settings are specific to the currently
open project. Make sure the correct project is open in the Robot
software.
To set the robot comm port:
1
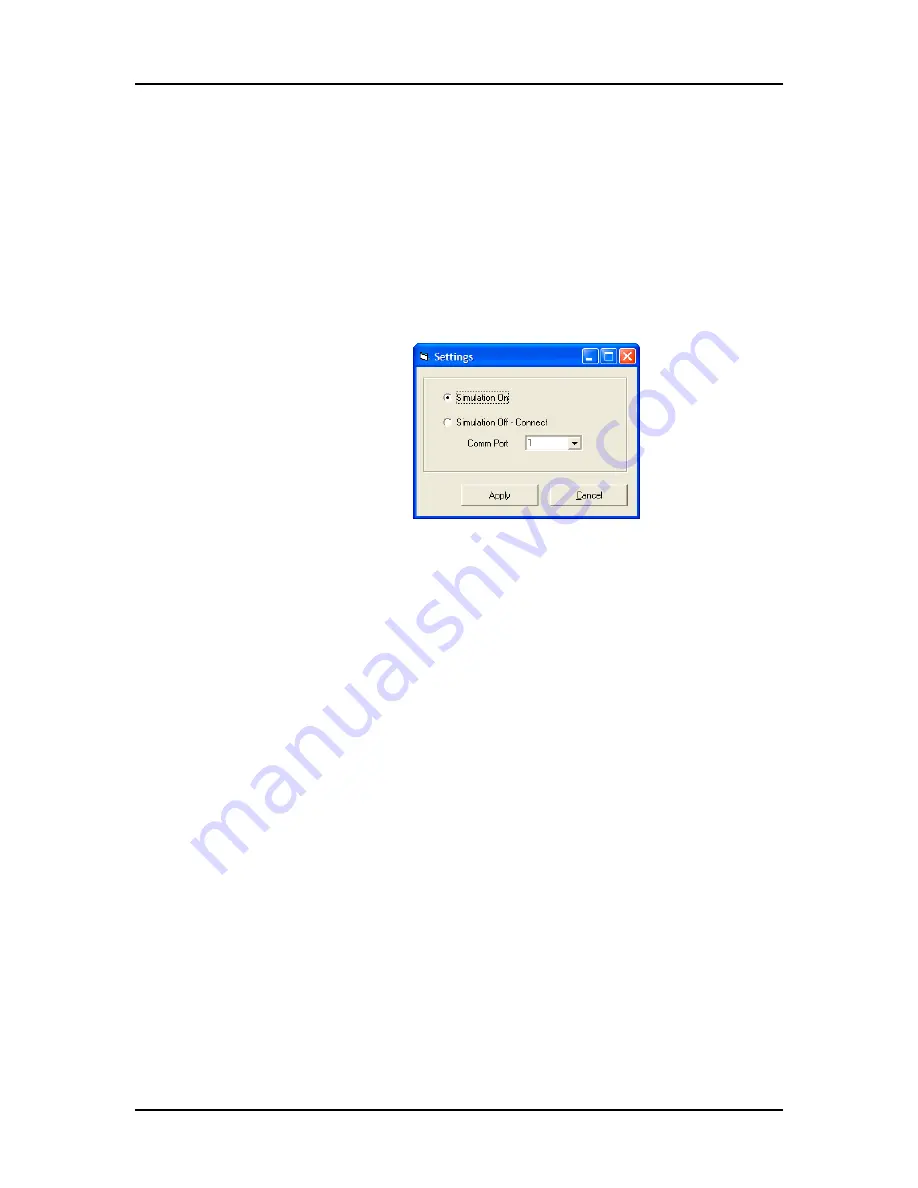
On the Robot main window, select
Configuration
→
Settings
.
The Settings window opens as shown in
.
Figure 2. Settings Window
2
Select the desired
Simulation
setting, either On or Off.
Simulation Off enables communication with the robot.
Simulation On simulates communication with the robot and does
not move the robot.
3
Select the number of the
Comm port
that the robot is connected
to on the computer. (If you are using simulation mode, the
Comm port is not used.)
4
Click the
Apply
button to apply the settings and close the
Settings window.
5
To save the changes, select
File
→
Save
.
If there are multiple robots in the system, you must set the Comm
ports for the additional robots:
1
Select
File
→
Open
, select the .
ini
file for the next robot, and
click the
Open
button. A Save dialog opens if there are unsaved
changes to the currently open project.
2
Click
Yes
if you want to save the changes to the last robot
settings.
3
Open the
Settings
window and set the Comm port for the robot.
4
Repeat for all robots in the system.





















































