





























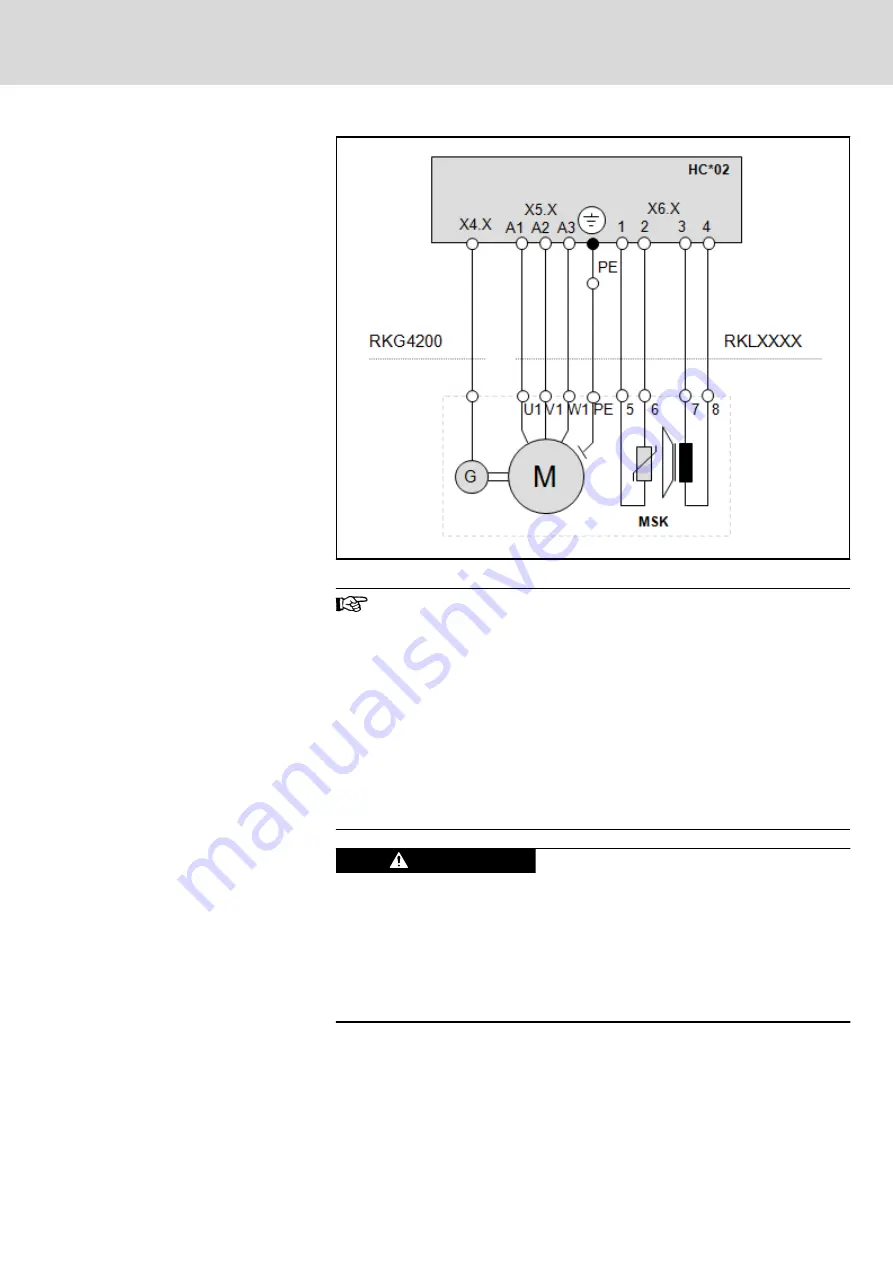
Fig. 5-25:
Connecting a MSK motor to the MTX micro
●
An encoder connection point X4 and a temperature monitor‐
ing connection point X6 are automatically allocated to each
motor connection point X5. The following applies: X5.1 →
X4.1 → X6.1, … X5.4 → X4.4 → X6.4
●
We recommend that you use the Rexroth encoder cable
RKG4200 for connecting the motor encoder.
●
We also recommend that you use the Rexroth motor cable
RKL for connecting the motors. The shield is connected via
the shield connection points XS2 (tube clips).
●
The maximum length of the connecting cables is 40 m.
●
The motor holding brake (X6.X terminals 3, 4) is optionally
available.
The descent of a vertical axis may result in
fatal injuries!
DANGER
●
The maximum holding torque that can be applied by the optional holding
brake of the MSK motors is the nominal motor torque.
●
The motor holding brake alone cannot be used as a holding brake for
the purpose of personal protection.
●
If the holding torque is higher, use must be made of a suitable external
brake.
Activating an external holding brake
To secure vertical axes or to connect a spindle brake, an external holding
brake can be connected to each X6 terminal. As is the case with the motor
brake, this brake will also be automatically controlled by the MTX micro.
DOK-MTXMIC-EASY*******-CO06-EN-P
Bosch Rexroth AG
55/177
IndraMotion MTX micro Easy Setup for Standard Turning and Milling Machines
Selecting and connecting the hardware







































































