





























9.4.5
Optimizing the position control loop
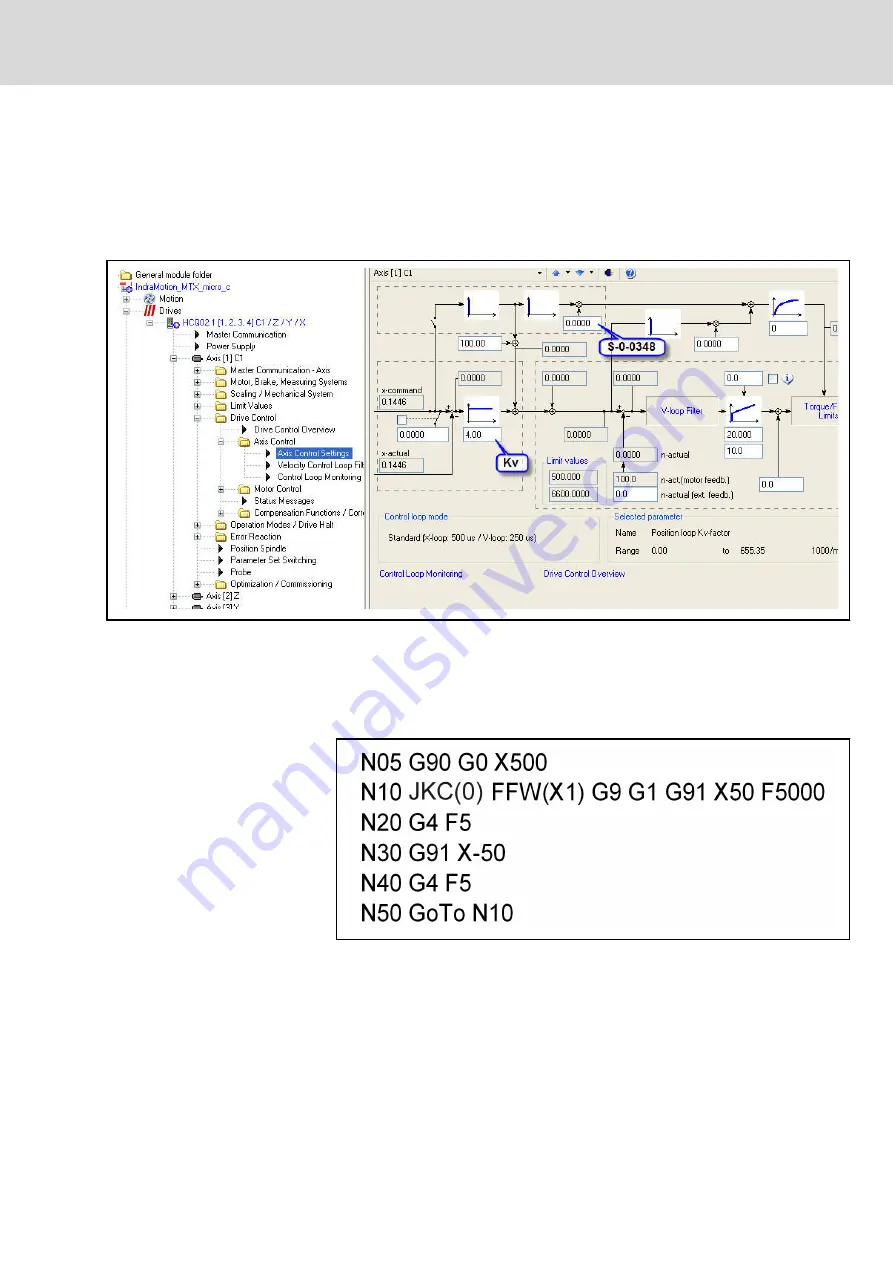
The Kv (S-0-0104), acceleration feedforward (S-0-0348) and the jerk limita‐
tion (MaxAxJerk) parameters are the relevant parameters for optimizing the
position control loop. At first, the drive parameters are set, then the jerk limi‐
tation is determined. The drive parameters can be found in the "Axis control
settings" dialog.
Fig. 9-19:
Setting the Kv and feed forward parameters
To optimize the position control loop, oscillate the axis cyclically between two
positions using an NC program. Change the Kv and feed forward parameters
during the traversing motion of the axis and observe its behavior with the os‐
cilloscope. Ensure that the jerk limitation is switched off with the JKC(0) com‐
mand and that the feed forward is switched on with the FFW(1) command.
Example of the x-axis
Fig. 9-20:
NC program
DOK-MTXMIC-EASY*******-CO06-EN-P
Bosch Rexroth AG
117/177
IndraMotion MTX micro Easy Setup for Standard Turning and Milling Machines
Commissioning the drives







































































