





























6.3 Updating revolution counters
6.3.1 Updating revolution counters on OmniCore robots
Introduction
This section describes how to do a rough calibration of each manipulator axis by
updating the revolution counter for each axis, using the FlexPendant.
Step 1 - Manually running the manipulator to the synchronization position
Use this procedure to manually run the manipulator to the synchronization position.
Note
Action
Select axis-by-axis motion mode.
1
See
Synchronization marks and synchron-
ization position for axes on page 715
Jog the manipulator to align the synchron-
ization marks.
2
Step 2 - Updating the revolution counter
with the FlexPendant on page 720
When all axes are positioned, update the
revolution counter.
3
Correct calibration position of axis 4
When jogging the manipulator to synchronization position, it is extremely important
to make sure that axis 4 is positioned correctly. Axis 4 can be calibrated at the
wrong turn, resulting in an incorrect manipulator calibration.
Make sure axis 4 is positioned according to the cable harness status, not only
according to the synchronization marks. Use the following procedure to check and
correct the axis 4 position.
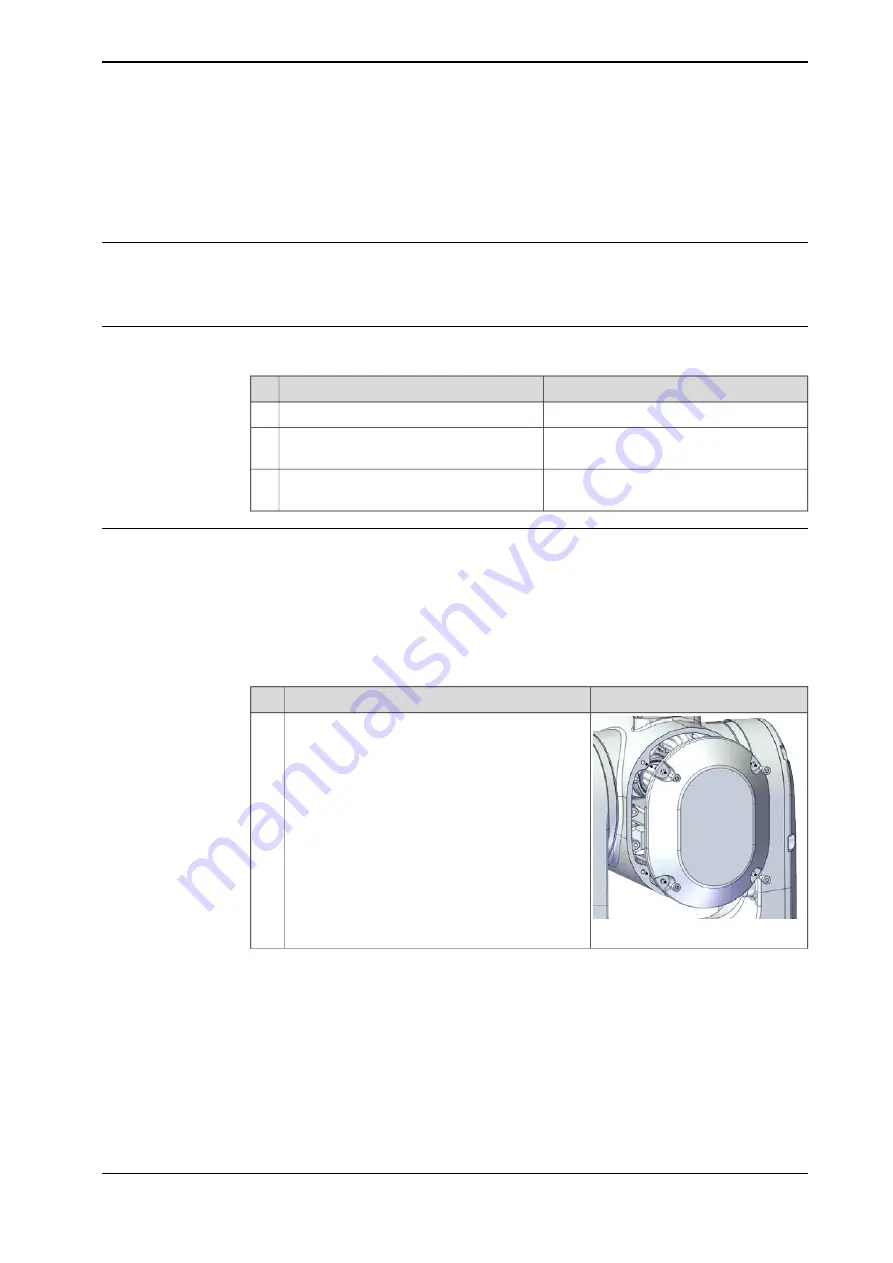
Note
Action
xx1800003011
Remove the housing cover.
1
Continues on next page
Product manual - IRB 1100
717
3HAC064992-001 Revision: L
© Copyright 2019-2022 ABB. All rights reserved.
6 Calibration
6.3.1 Updating revolution counters on OmniCore robots
Содержание IRB 1100
Страница 1: ...ROBOTICS Product manual IRB 1100 ...
Страница 2: ...Trace back information Workspace 22C version a10 Checked in 2022 09 29 Skribenta version 5 5 019 ...
Страница 8: ...This page is intentionally left blank ...
Страница 16: ...This page is intentionally left blank ...
Страница 38: ...This page is intentionally left blank ...
Страница 50: ...This page is intentionally left blank ...
Страница 738: ...This page is intentionally left blank ...
Страница 760: ...This page is intentionally left blank ...
Страница 764: ......
Страница 765: ......