





























Note
Action
xx1800002501
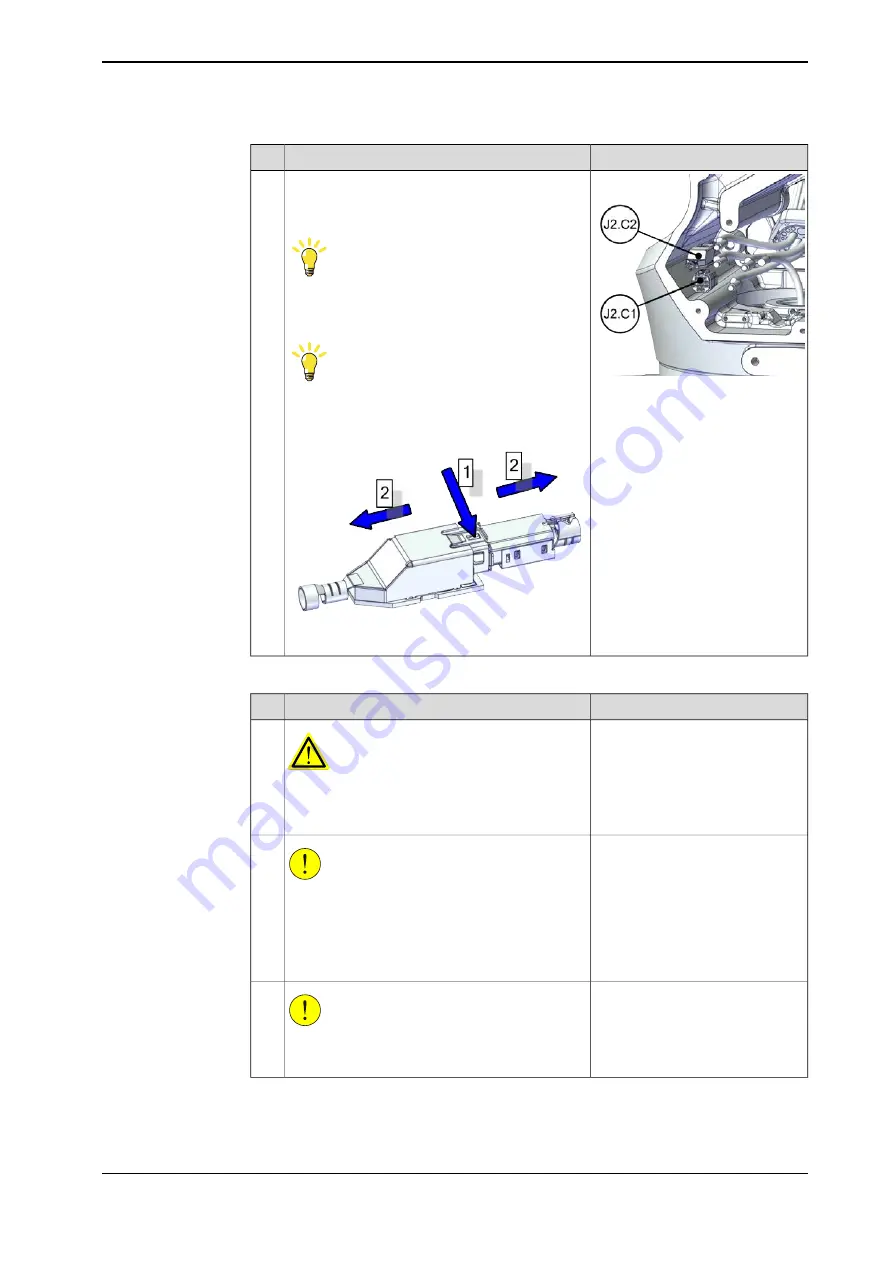
Disconnect the connectors.
•
J2.C1
•
J2.C2
Tip
Take photos of the connector and cable position
before disconnecting them, to have as a reference
when reconnecting.
Tip
The connector clip has to be pressed (1) and
pushed forward (2) to separate the J2.C2 (for
Ethernet cabling).
xx1800002943
4
Putting the robot on its side
Note
Action
DANGER
Make sure that all supplies for electrical power,
hydraulic pressure, and air pressure are turned
off.
1
CAUTION
For robots with protection type Clean Room
Always cut the paint with a knife and grind the
paint edge when disassembling parts of the robot!
See
Cut the paint or surface on the robot before
2
CAUTION
The IRB 1100 robot weighs 21.1 kg and can be
lifted by one person.
3
Continues on next page
Product manual - IRB 1100
241
3HAC064992-001 Revision: L
© Copyright 2019-2022 ABB. All rights reserved.
5 Repair
5.4.1 Replacing the base
Continued
Содержание IRB 1100
Страница 1: ...ROBOTICS Product manual IRB 1100 ...
Страница 2: ...Trace back information Workspace 22C version a10 Checked in 2022 09 29 Skribenta version 5 5 019 ...
Страница 8: ...This page is intentionally left blank ...
Страница 16: ...This page is intentionally left blank ...
Страница 38: ...This page is intentionally left blank ...
Страница 50: ...This page is intentionally left blank ...
Страница 738: ...This page is intentionally left blank ...
Страница 760: ...This page is intentionally left blank ...
Страница 764: ......
Страница 765: ......







































































