





























6 Calibration
6.1 Introduction to calibration
6.1.1 Introduction and calibration terminology
Calibration information
This chapter includes general information about the recommended calibration
methods and also the detailed procedures for updating the revolution counters,
checking the calibration position etc.
Detailed instructions of how to perform Axis Calibration are given on the
FlexPendant during the calibration procedure. To prepare calibration with Axis
Calibration method, see
Calibrating with Axis Calibration method on page 721
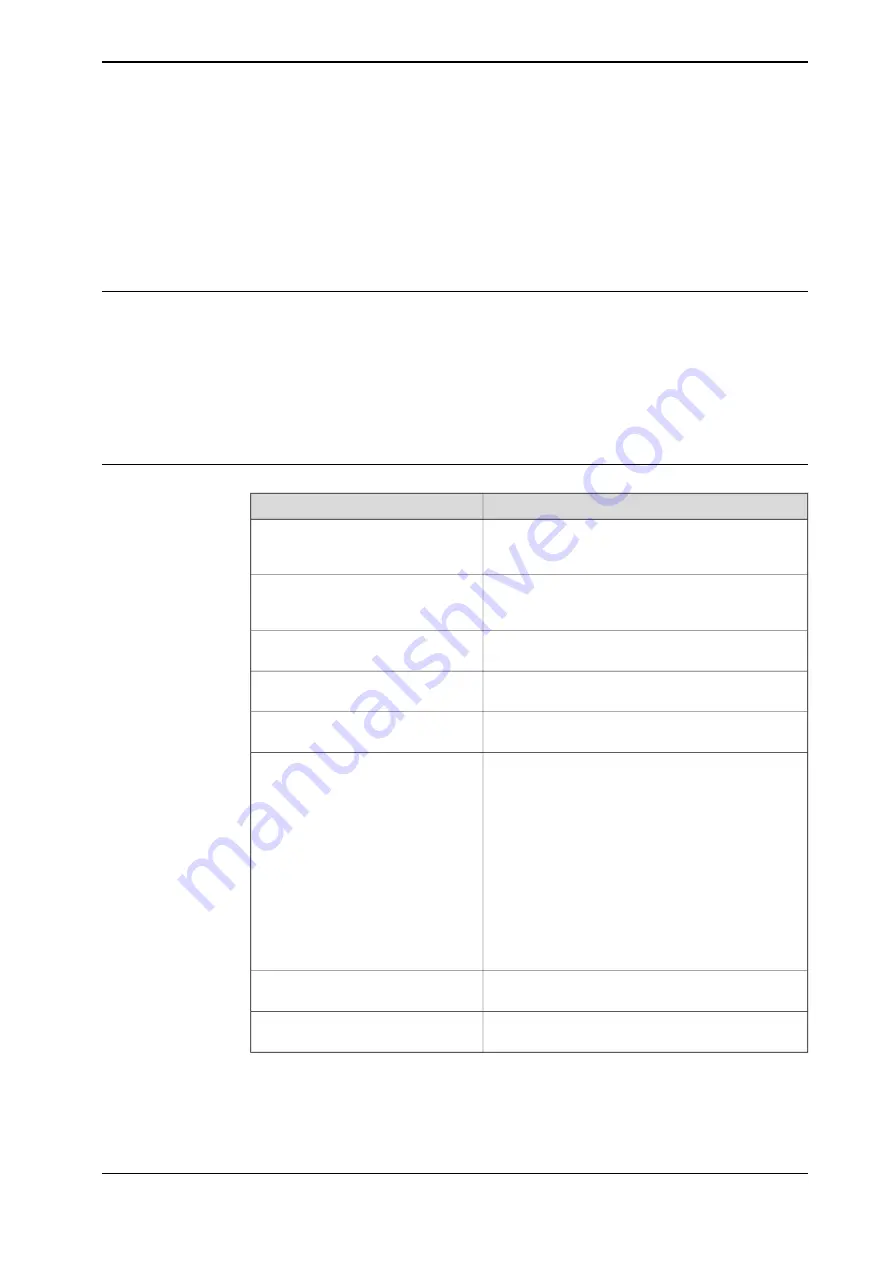
Calibration terminology
Definition
Term
A collective term for several methods that might be
available for calibrating the ABB robot. Each method
contains calibration routines.
Calibration method
Known position of the complete robot where the
angle of each axis can be checked against visual
synchronization marks.
Synchronization position
Known position of the complete robot that is used
for calibration of the robot.
Calibration position
A generic term for all calibration methods that aim
to move the robot to calibration position.
Standard calibration
A calibration routine that generates a new zero posi-
tion of the robot.
Fine calibration
A calibration routine that in the first step generates
a reference to current zero position of the robot. The
same calibration routine can later on be used to re-
calibrate the robot back to the same position as when
the reference was stored.
Reference calibration
This routine is more flexible compared to fine calib-
ration and is used when tools and process equipment
are installed.
Requires that a reference is created before being
used for recalibrating the robot.
Requires that the robot is dressed with the same
tools and process equipment during calibration as
during creation of the reference values.
A calibration routine to make a rough calibration of
each manipulator axis.
Update revolution counter
Visual marks on the robot axes. When marks are
aligned, the robot is in synchronization position.
Synchronization mark
Product manual - IRB 1100
711
3HAC064992-001 Revision: L
© Copyright 2019-2022 ABB. All rights reserved.
6 Calibration
6.1.1 Introduction and calibration terminology
Содержание IRB 1100
Страница 1: ...ROBOTICS Product manual IRB 1100 ...
Страница 2: ...Trace back information Workspace 22C version a10 Checked in 2022 09 29 Skribenta version 5 5 019 ...
Страница 8: ...This page is intentionally left blank ...
Страница 16: ...This page is intentionally left blank ...
Страница 38: ...This page is intentionally left blank ...
Страница 50: ...This page is intentionally left blank ...
Страница 738: ...This page is intentionally left blank ...
Страница 760: ...This page is intentionally left blank ...
Страница 764: ......
Страница 765: ......







































































