





























5.3.1 Replacing the upper cable package
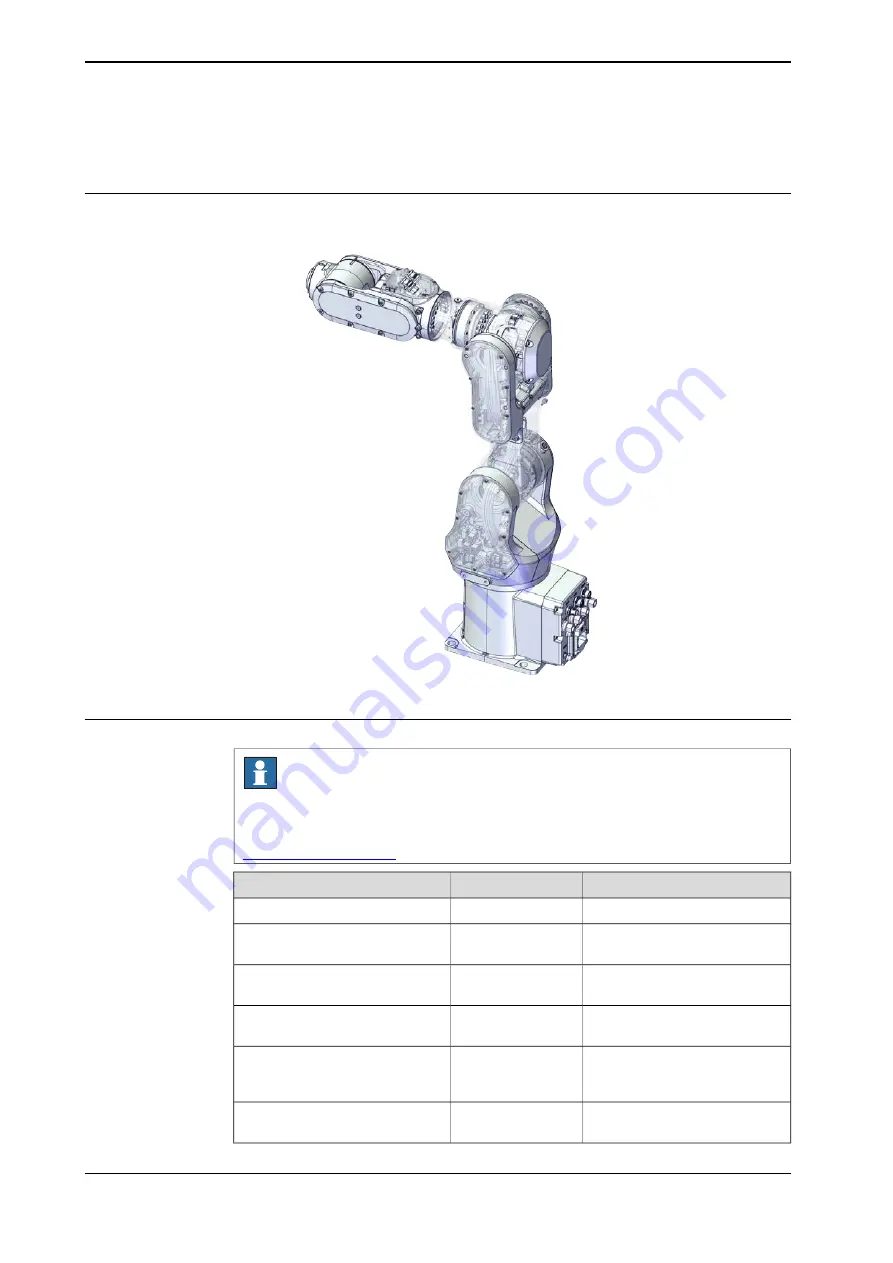
Location of the upper cable package
The upper cable package is located as shown in the figure.
xx1800002466
Required spare parts
Note
The spare part numbers that are listed in the table can be out of date. See the
latest spare parts of the IRB 1100 via myABB Business Portal,
.
Note
Article number
Spare part
Used with IRB 1100-4/0.475.
3HAC060419-001
Upper cable harness, basic
Used with IRB 1100-4/0.475.
3HAC060419-002
Upper cable harness (CP/CS and
air hose, without Ethernet)
Used with IRB 1100-4/0.475.
3HAC060419-003
Upper cable harness (CP/CS and
air hose, with Ethernet)
Used with IRB 1100-4/0.58.
3HAC060416-001
Extension upper cable harness,
basic
Used with IRB 1100-4/0.58.
3HAC060416-002
Extension upper cable harness
(CP/CS and air hose, without Ether-
net)
Used with IRB 1100-4/0.58.
3HAC060416-003
Extension upper cable harness
(CP/CS and air hose, with Ethernet)
Continues on next page
126
Product manual - IRB 1100
3HAC064992-001 Revision: L
© Copyright 2019-2022 ABB. All rights reserved.
5 Repair
5.3.1 Replacing the upper cable package
Содержание IRB 1100
Страница 1: ...ROBOTICS Product manual IRB 1100 ...
Страница 2: ...Trace back information Workspace 22C version a10 Checked in 2022 09 29 Skribenta version 5 5 019 ...
Страница 8: ...This page is intentionally left blank ...
Страница 16: ...This page is intentionally left blank ...
Страница 38: ...This page is intentionally left blank ...
Страница 50: ...This page is intentionally left blank ...
Страница 738: ...This page is intentionally left blank ...
Страница 760: ...This page is intentionally left blank ...
Страница 764: ......
Страница 765: ......


































































