





























8 Operation
8.5.1 Inspection and Checking before Trial Operation
8-24
8.5
Trial Operation
This section describes a trial operation using EtherCAT (CoE) communications.
8.5.1
Inspection and Checking before Trial Operation
To ensure safe and correct trial operation, inspect and check the following items before starting trial operation.
(1) Servomotors
Inspect and check the following items, and take appropriate measures before performing trial operation if any
problem exists.
• Are all wiring and connections correct?
• Are all nuts and bolts securely tightened?
• If the servomotor has an oil seal, is the seal undamaged and oiled?
Note: When performing trial operation on a servomotor that has been stored for a long period of time, perform the inspec-
tion according to the procedures described in
11.1 Inspection and Maintenance
.
(2) SERVOPACKs
Inspect and check the following items, and take appropriate measures before performing trial operation if any
problem exists.
• Are all wiring and connections correct?
• Is the correct power supply voltage being supplied to the SERVOPACK?
8.5.2
Trial Operation via EtherCAT (CoE) Communication
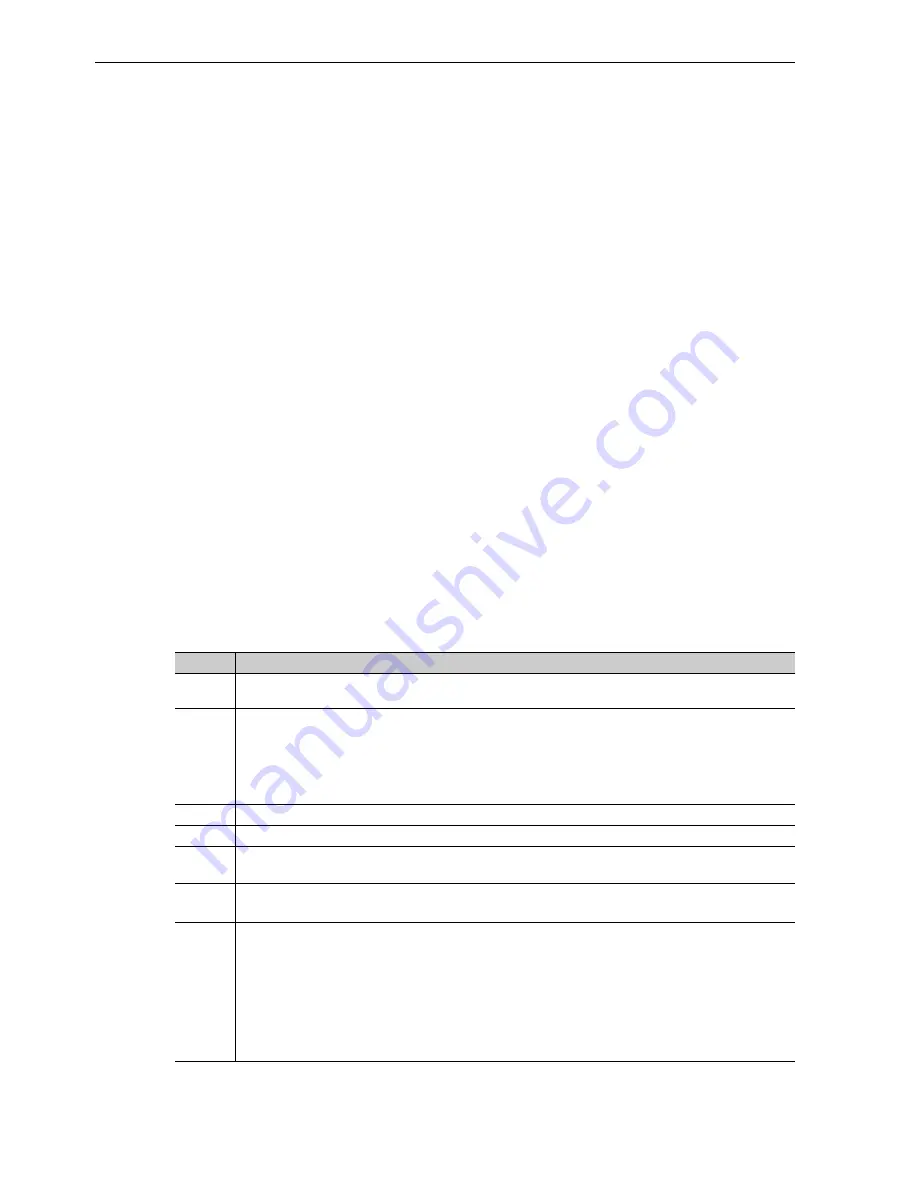
An example procedure for EtherCAT (CoE) communications using Profile Position Mode for trial operation is
provided in the following table.
For details, refer to
Σ
-V-SD series User’s Manual For Command Profile EtherCAT (CoE) Communications
Reference
(manual no.: SIEP S800000 95).
∗
Use PDO for objects that are PDO mapped.
The values will not be changed even if SDO is changed.
Step
Operation
1
Make sure that the wires are connected correctly and then connect the I/O connector (CN1) and the Ether-
CAT (CoE) communications connectors (CN9A and CN9B).
2
Turn ON the power supply to the
Σ
-V-SD Driver.
When the control power is supplied, the SERVOPACK RDY indicator will light.
When the main circuit power is supplied normally, the SERVOPACK charge indicator (CHARGE) will light.
When a master or slave that has its power supply turned ON is connected, the LINK1 and LINK2 indicators
for the CN9A and CN9B connectors to which the EtherCAT (CoE) communications cables are connected
will light.
3
Change the EtherCAT communication state to Operational.
4
Set the Modes of operation to Profile Position mode.
5
Change the drive state to “Operation enabled” by command of the Controlword.
When the power is supplied to the motor, the Statusword indicates “Operation enabled” state.
6
Set the Target position, Profile velocity, Profile acceleration, and Profile deceleration, and then set Control-
word to start positioning.
*
7
Check the following points while performing in step 6.
• Check whether the motor is moving to the reference direction.
If motor is moving to reverse direction to the reference, then change the setting of servomotor direction
rotation.
• Check to make sure that there is no abnormal vibration, noise, or heating. If any abnormality is found, clear
the problem.
Note: Because the running-in of the load machine is not sufficient at the time of the trial operation, the servo-
motor may become overloaded.





















































