





























www.wobit.com.pl
User manual SID116 – 09.04.2015r. v.1.0 page 21
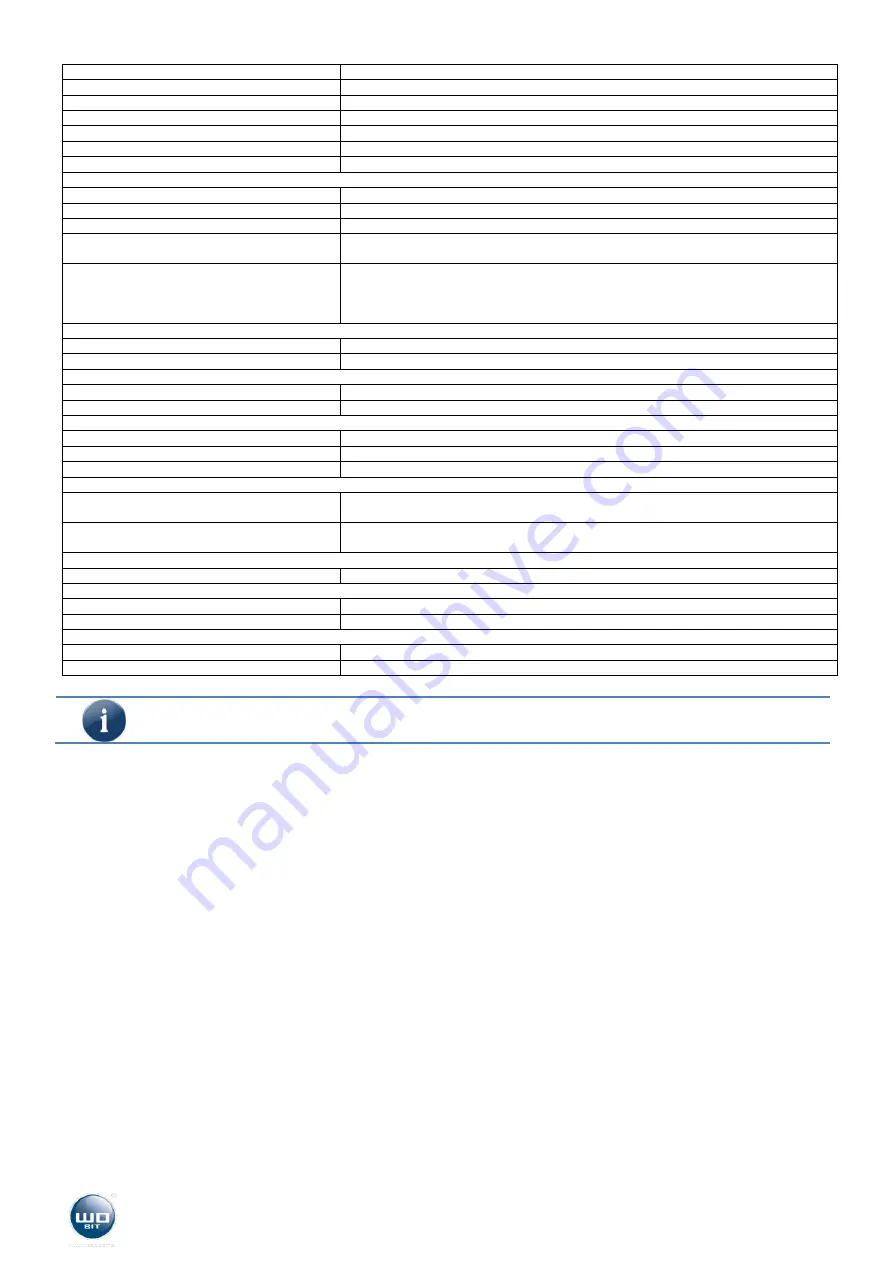
Position regulator: P gain
Gain of position regulator proportional constant
Position regulator: Position Feed Forward Coefficient
Position Feed Forward Coefficient
Velocity regulator: P gain
Gain of velocity regulator proportional constant
Velocity regulator: I gain
Gain of velocity regulator integral constant
Velocity regulator: Velocity Feed Forward Coefficient
Feed Forward Coefficient
Current regulator: P gain
Gain of current regulator proportional constant
Current regulator: I gain
Gain of current regulator integral constant
03. Motor parameters
Encoder resolution
Resolution of encoder mounted on motor shaft (rated value without square wave)
Motor rated current
Motor rated current (driver will limit maximal current to this value) in mA
Motor rated velocity
Motor rated velocity (driver will limit maximal velocity to this value) in rpm
Motor rated voltage
Motor rated supply voltage (driver will limit maximal voltage to this value) in mV. Value can’t be
higher than power supply voltage value
Power supply voltage
Driver’s PSU output voltage in mV. Above this voltage driver starts braking/ energy recovery.
Value taken under consideration while determining motor voltage limit.
Please enter voltage maximal value i.e. while accumulator supplying please enter voltage for
completely charged accumulators, in case of adapter please measure existing voltage.
04. Velocity profile at position regulation mode
Maximal velocity
Driver maximal velocity limitation in rpm
Acceleration
Acceleration / Profile braking in rps
2
05. Velocity profile at velocity regulation mode
Maximal velocity
Driver maximal velocity limitation in rpm
Acceleration
Acceleration / Profile braking in rps
2
06. Modbus protocol
Baudrate
Baudrate in bps. Max 115 200
Device address
Device address at Modbus protocol
Minimal time of JOG command
Time of keeping JOG command by Modbus. Command will be run on time defined in x * 10ms
07. Filters
Current filter
Motor averaged current filter (homing mode, displayed current) please enter sample number
1..1024. Filter is moving average filter with 18 kHz frequency.
Analog input filter
Analog input filter, please enter sample number 1..1024. Filter is moving average filter with 1 kHz
frequency.
08. Error handling
Allowable tracing error
Allowable position error, Triggering threshold of position tracking error in steps
09. Mechanical brake settings
Activation delay
Time between achieving correct position and activation of brake (ms)
Position tolerance
Allowable position error, brake activation threshold in steps
10. Braking resistor settings
Resistor resistance
Braking resistor resistance in ohms (Ω)
Resistor rated power
Braking resistor rated power (W)
All parameter changes in advanced settings tab requires confirmation by ENTER button. Permanent
settings record requires pressing Save button at main application window.
4.2.3
I/O configuration.
All SID116 driver I/O are mappable i.e. for any I/O there is a possibility to ascribe any signal from allowable signal
range. Moreover fot each I/O can be independently configured its polarity. I/O configuration window is avaliable
at application menu -> Settings -> I/O configuration.







































































