

























www.wobit.com.pl
User manual SID116 – 09.04.2015r. v.1.0 page 29
5.2
Open loop operation (PWM mode)
Driver basic operation mode is an open loop mode. At this mode setting value is transmitted directly as
Pulse Width Modulation signal duty value which control motor. Setting value is calculated in relation
1/10. It means that setting value equal to 1 corresponds to 0.1% PWM signal duty. Setting sign
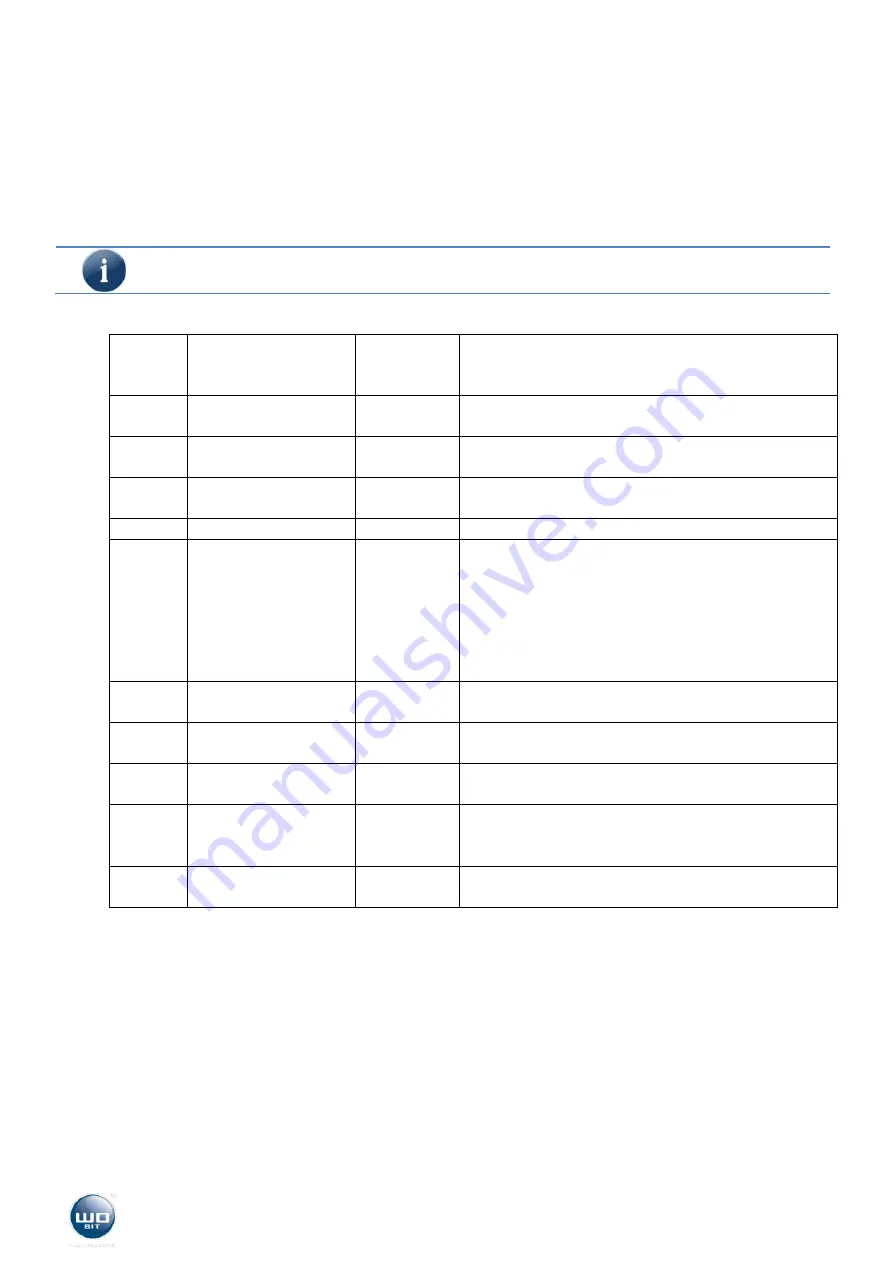
determines motor rotation direction, regulation range is from -96% up to 96% input voltage. Exemplary
setting values:
Maximal PWM signal duty can be lower when motor voltage limit is active.
Setting
value
R1..R16
Setting type
PWM duty
Description
-960
PWM_BEZWZGLEDNIE -96%
Motor is control with maximal duty to negative
rotation direction
-500
PWM_BEZWZGLEDNIE -50%
Motor is control with 50% duty to negative rotation
direction
-100
PWM_BEZWZGLEDNIE -10%
Motor is control with 10% duty to negative rotation
direction
0
PWM_BEZWZGLEDNIE 0
Motor is stopped
100
PWM_BEZWZGLEDNIE 10%
Motor is control with 10% duty to positive rotation
direction
500
PWM_BEZWZGLEDNIE 50%
Motor is control with 50% duty to positive rotation
direction
960
PWM_BEZWZGLEDNIE 96%
Motor is control with maximal duty to positive
rotation direction
-100
PWM_WZGLEDNIE
Decreasing
by 10%
Decreasing current duty by 10%
0
PWM_WZGLEDNIE
No changes
Drive after taking command will be move with
previously set duty. This function is useful while
control using inputs setting (R1-R10) or Jog command
100
PWM_WZGLEDNIE
Increasing
by 10%
Increasing of current duty by 10%
Furthermore at open loop mode current limit is active. If motor current will exceed rated current set at
application settings driver will limit it to safe value. Drive can signalize overloads which is defined at error
handling window.
5.3
Regulator adjusting.
5.3.1
Regulator structure.







































































