





























374
Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
Appendix H User-defined Function Block Motion Instructions
Error Codes:
• 100 - Kinetix 5100 drive is not ready
• 101 - Kinetix 5100 drive is faulted
• 103 - MSF is executing
• 105 - Drive is disabled
• 107 - raC_Opr_K5100_MAS is executing
• 108 - Other motion UDFB is sending the command
• 115 - StartingIndex is out of range
• 129 - Motor is not connected
• 140 - Operation is not supported when device is virtual
raC_Opr_K5100_MAG
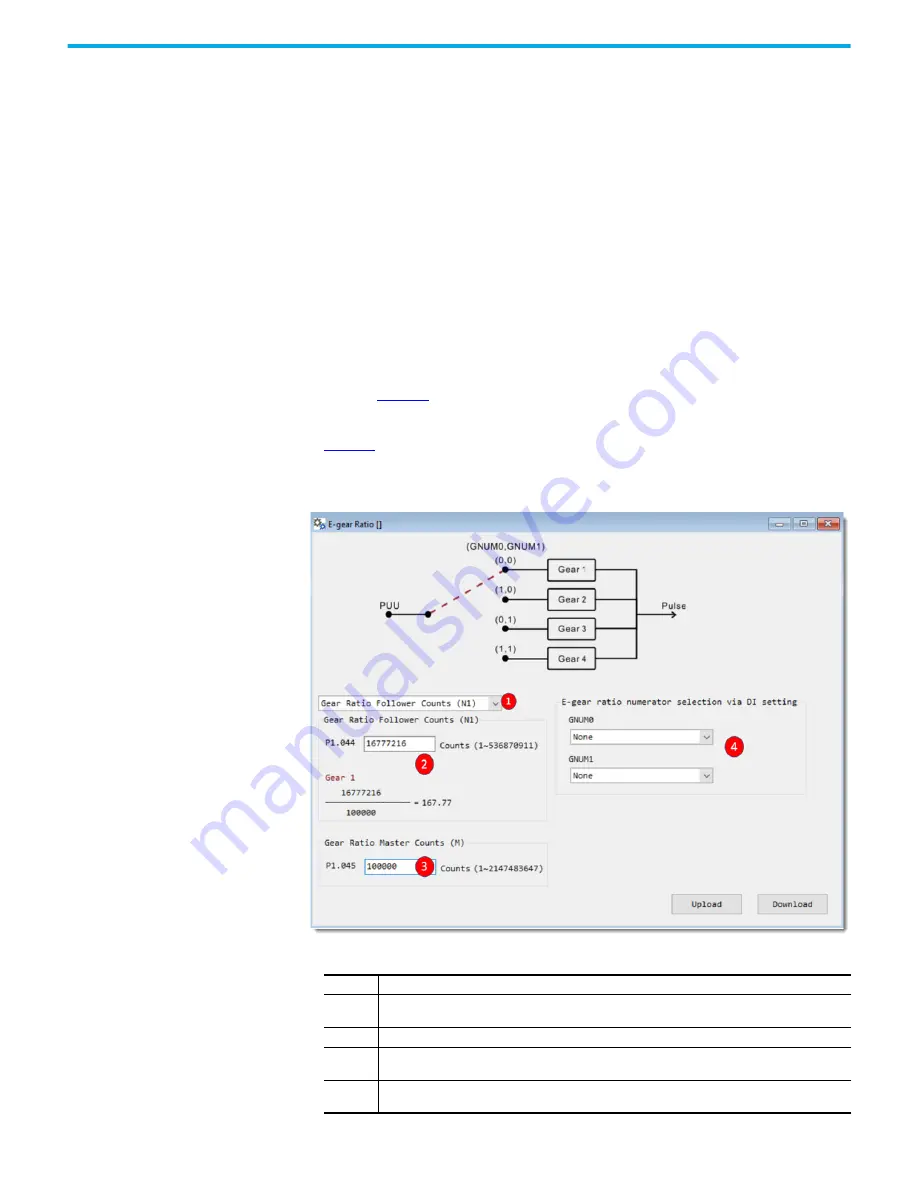
Use the Motion Axis Gear (MAG) to execute a pulse-pulse relationship with the drive. The MAG
uses the E-gear ratio configured in the KNX5100C software. The E-gear Ratio dialog box is
shown in
. When the MAG is used, the drive behaves like it is in PT (Position Terminal
- or Pulse Train) mode and the drive uses the E-gear ratio to respond to master pulses.
describes the values in the E-gear Ratio dialog box. Not all values shown here are
used with the Motion Operation UDFB.
Figure 47 - E-gear Ratio Dialog Box
Table 114 - E-gear Ratio Dialog Box Settings
Item
Description
1
Gear Ratio Selection pull-down menu - You can choose from four different ratios (N1…N4) (Not used
with UDFB).
2
Gear Ratio Follower Counts (N1) - Set this value as the motor feedback resolution.
3
Gear Ratio Master Counts (M) - Set this value as the counts/motor resolution. This value is set for
whatever your application requires. Typical values are 100,000 counts for a high-resolution encoder.
4
GNUM0/1 - These values are mapped to the Digital Inputs that represent binary weighted values to
select the Gear Ratio value. (Not used with UDFB)