





























172
Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
Chapter 9 Motion Control
Axis State Update
On motion execution, although the motion profile is controlled by Motion Engine as a
background task, which is independent from POU scan, axis state update is still dependent on
when the relevant motion function block is called by the POU scan.
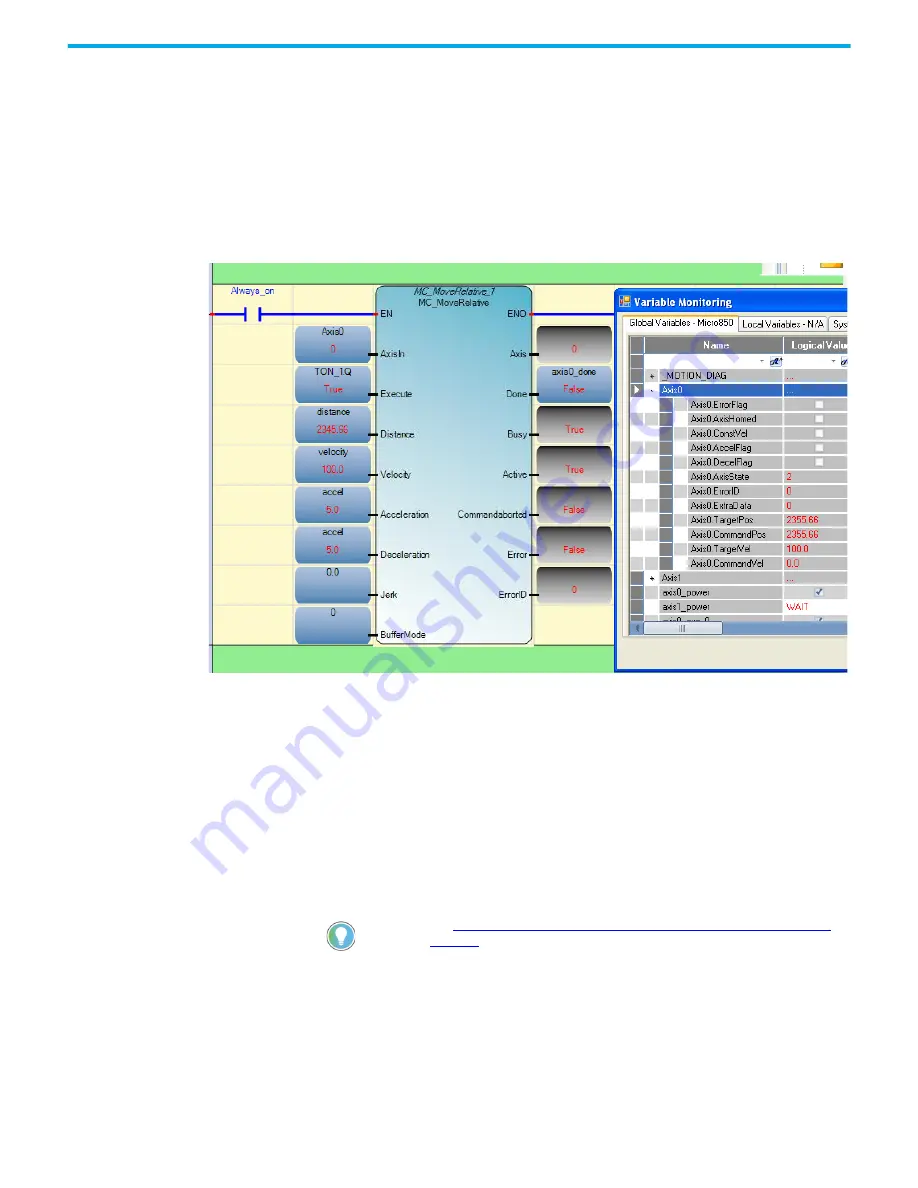
For example, on a moving axis on a Ladder POU (state of a rung=true), an MC_MoveRelative
function block in the rung is scanned and the axis starts to move. Before MC_MoveRelative
completes, the state of the rung becomes False, and MC_MoveRelative is no longer scanned. In
this case, the state of this axis cannot switch from Discrete Motion to StandStill, even after the
axis fully stops, and the velocity comes to 0.
Limits
The Limits parameter sets a boundary point for the axis, and works in conjunction with the
Stop parameter to define a boundary condition for the axis on the type of stop to apply when
certain configured limits are reached.
There are three types of motion position limits.
• Hard Limits
• Soft Limits
• PTO Pulse Limits
If any one of these limits is reached on a moving axis (except on homing), an over travel limit
error will be reported and the axis will be stopped based on configured behavior.
Motion Axis Configuration in Connected Components Workbench on
for information on how to configure limits and stop profiles
and the acceptable value range for each.