





























Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
197
Chapter 9 Motion Control
POU PWM_Program
The POU defines four variables.
HSC Feedback Axis
From Connected Components Workbench software version 8.0 onwards, support has been
added for an HSC (High-Speed Counter) Feedback Axis that uses the same instructions as the
PTO Motion Axis. UDFBs are still supported. You can use either one but you cannot select both
for the same plug-in.
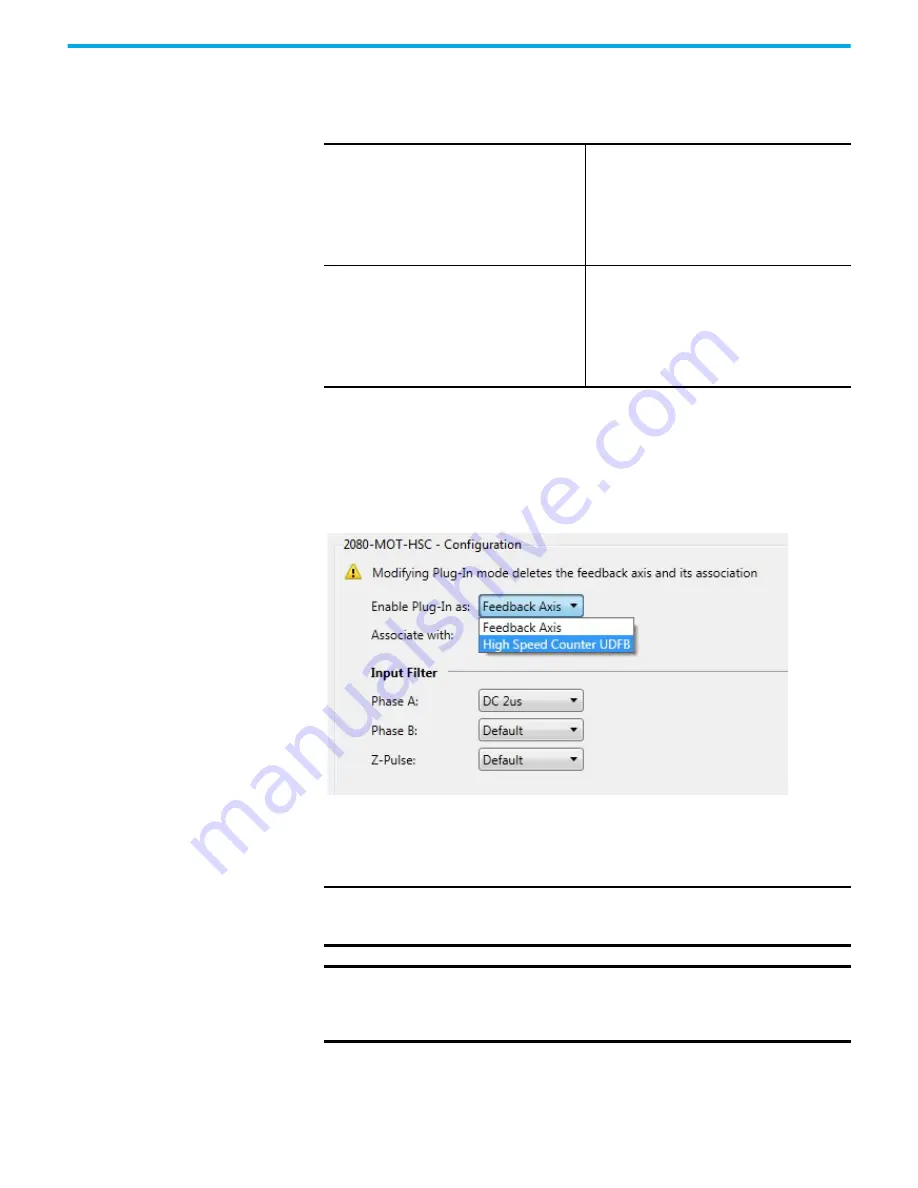
EXAMPLE: Example of Selecting Feedback Axis or UDFB with 2080-MOT-HSC Plug-in
The HSC Feedback Axis provides ease-of-use as you no longer need to program the function
blocks, and it also uses up less memory on the controller. The HSC Feedback Axis uses only the
administrative function blocks from the PTO Motion Axis and they share the same Axis Monitor.
Variable MC_Power_1
(* *)
Direction: VAR
Data Type: MC_Power
Attribute: ReadWrite
Direct variable (Channel):
Variable MC_MoveVelocity_1
(* *)
Direction: VAR
Data Type: MC_MoveVelocity
Attribute: ReadWrite
Direct variable (Channel):
Variable Update_PWM_Duty_Cycle
(* *)
Direction: Var
Data type: BOOL
Attribute: ReadWrite
Direct variable (Channel):
Variable MC_Power_1
(* *)
Direction: VAR
Data Type: MC_Power
Attribute: ReadWrite
Direct variable (Channel):
IMPORTANT
The counters are not reset to zero for program download. For example, if
using the feedback axis, use the MC_ResetPosition function block to
reset the position to zero.
IMPORTANT
If the feedback axis is in the error state because the configured position
limits have been exceeded, using the MC_Reset function block to reset
the axis may not clear the error as there may still be pulse detected from
the encoder.