





























Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
173
Chapter 9 Motion Control
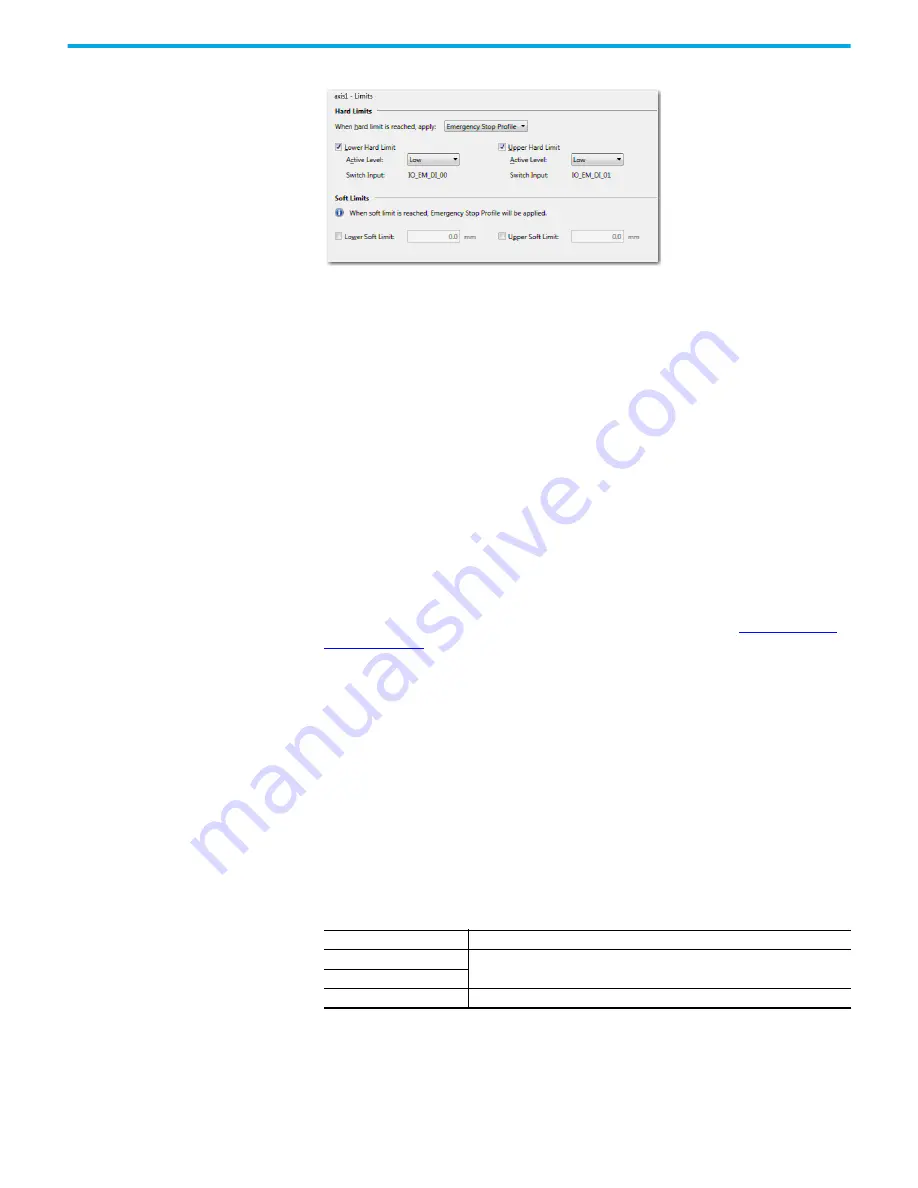
Sample Limits configuration in Connected Components Workbench
Hard Limits
Hard limits refer to the input signals received from physical hardware devices such as limit
switches and proximity sensors. These input signals detect the presence of the load at the
maximum upper and minimum lower extents of allowable motion of the load or movable
structure that carries the load, such as a load tray on a transfer shuttle.
Hardware limits are mapped to discrete inputs that are associated with data tags/variables.
When a hard limit switch is enabled, the axis comes to a stop when the limit switch is detected
during motion. If hard stop on hard limit switch is configured as ON and the limit is detected,
motion is stopped immediately (that is, PTO pulse is stopped immediately by the hardware).
Alternatively, if hard stop on hard limit switch is configured as OFF, motion will be stopped
using Emergency Stop parameters.
When any hard limit switch is enabled, the input variable connecting to this physical input can
still be used in User Application.
When a hard limit switch is enabled, it will be used automatically for MC_Home function block,
if the switch is in the Homing direction configured in the Connected Components Workbench
software (Mode: MC_HOME_ABS_SWITCH or MC_HOME_REF_WITH_ABS). See
Soft Limits
Soft limits refer to data values that are managed by the motion controller. Unlike hardware
limits that detect the presence of the physical load at specific points in the allowable motion
of the load, soft limits are based on the stepper commands and the motor and load
parameters.
Soft limits are displayed in user-defined units. The user can enable individual soft limits. For
non-enabled soft limits (whether upper or lower), an infinite value is assumed.
Soft Limits are activated only when the corresponding axis is homed. Users can enable or
disable soft limits, and configure an upper and lower limit setting through the Connected
Components Workbench software.
When a soft limit is enabled, the axis comes to a stop when the limit is detected during motion.
The motion is stopped using emergency stop parameters.
Soft Limits Checking on the Function Blocks
Function Block
Limits Checking
MC_MoveAbsolute
The target position will be checked against the soft limits before motion starts.
MC_MoveRelative
MC_MoveVelocity
The soft limits will be checked dynamically during motion.