





























Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
325
Appendix E PID Function Blocks
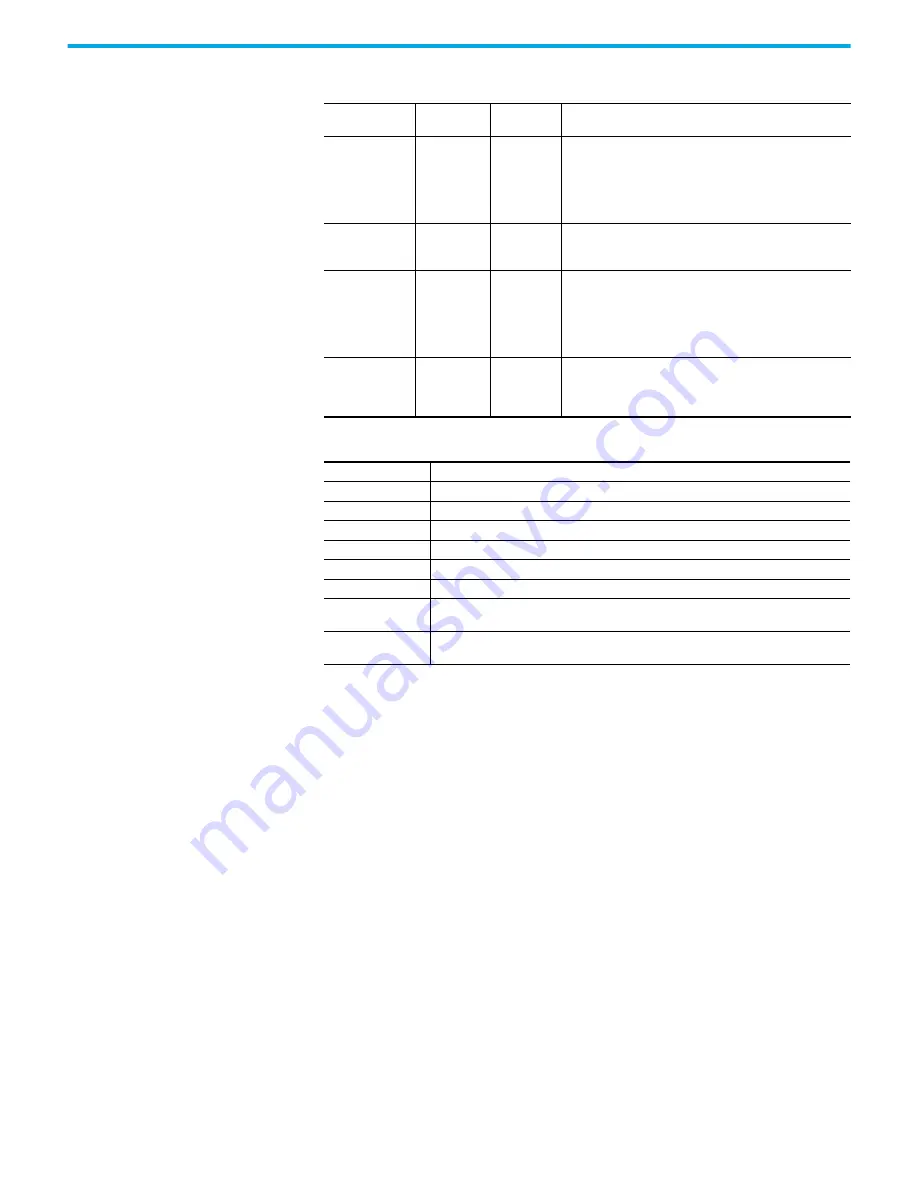
Table 84 - GAIN_PID Data Type
Parameter
Parameter
Type
Data Type
Description
Kc
Input
REAL
Controller gain for PID.
Proportional and Integral are dependent on this gain
(>= 0.0001).
Increasing Kc improves response time but also increases
overshoot and oscillation of the PID.
If Kc is invalid, an error occurs.
Ti
Input
REAL
Time integral constant in seconds (>= 0.0001).
Increasing Ti decreases overshoot and oscillation of the PID.
If Ti is invalid, an error occurs.
Td
Input
REAL
Time derivative constant in seconds (>= 0.0).
When Td equals 0, then there is no derivative action and PID
becomes a PI controller.
Increasing Td reduces the overshot and removes the
oscillation of the PID controller.
If Td is invalid, an error occurs.
FC
Input
REAL
Filter constant (>= 0.0).
Recommended range for FC is 0...20.
Increasing FC smooths the response of the PID controller.
If FC is invalid, an error occurs.
Table 85 - PID Error Codes
Error Code
Description
0
PID is working normally.
1
Kc is invalid.
2
Ti is invalid.
3
Td is invalid.
4
FC is invalid.
5
CVMin > CVMax, or CVMax < CVMin
6
CVManual < CVMin
CVManaul is invalid.
7
CVManual > CVMax
CVManual is invalid.