





























5-6
Item
R88D
-UP20V
R88D
-UP12V
R88D
-UP08V
R88D
-UP04V
R88D
-UP03V
R88D-
UP02V
Output
signals
Position feedback output
A-, B-, Z-phase line driver output (EIA RS-422A)
A-phase and B-phase (dividing rate setting): 16 to 2,048 pulses/revolution
Z-phase: 1 pulse/revolution
Speed monitor output
0.5 V/1,000 r/min
Current monitor output
0.5 V/rated torque
Sequence output
Alarm output, motor rotation detection, brake interlock, positioning completion;
open-collector outputs: 30 VDC, 50 mA (except for alarm code output, which is
30 VDC, 20 mA)
External regeneration processing
Required for regeneration of more than 30 times the
motor’s rotor inertia.
Required for regenera-
tion of more than 20
times the motor’s rotor
inertia.
Protective functions
Overcurrent, grounding, overload, overvoltage, overspeeding, runaway preven-
tion, transmission errors, encoder errors, deviation counter overflow
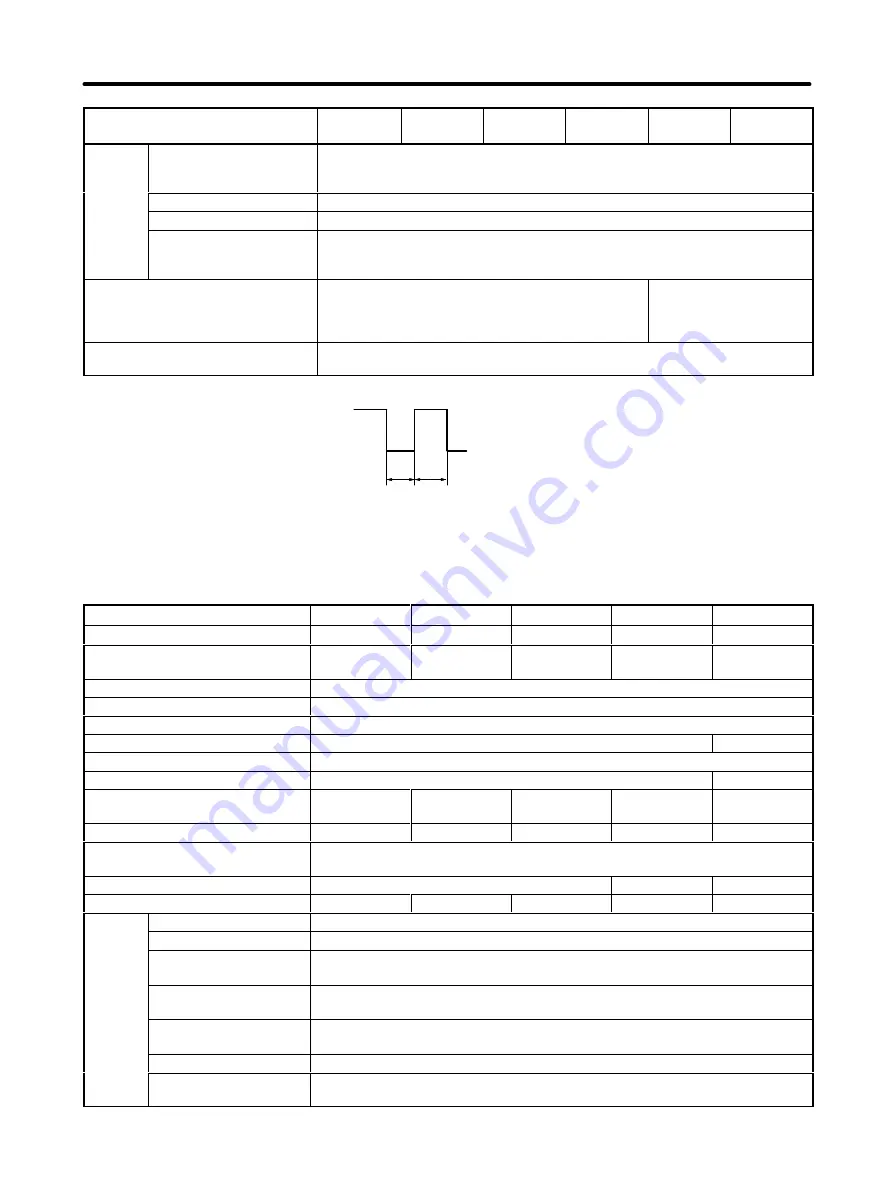
Note The input pulse width must meet the following conditions.
T
IL
,T
IH
≥
2.5
µ
s
H
L
T
IH
T
IL
H
100-VAC Input Servo Drivers Conforming to EC Directives
Item
R88D-UP03W
R88D-UP04W
R88D-UP10W
R88D-UP12W
R88D-UP15W
Continuous output current (0-P)
0.9 A
1.3 A
3.1 A
3.8 A
4.8 A
Momentary max. output current
(0-P)
2.8 A
4.1 A
10 A
12 A
15 A
Input power supply
Single-phase 100/115 VAC (85 to 127 V) 50/60 Hz
Control method
All-digital servo
Speed feedback
Optical encoder, 2,048 pulses/revolution
Applicable load inertia
Maximum of 30 times motor’s rotor inertia
20 times max.
Inverter method
PWM method based on IGBT
PWM frequency
11 kHz
7.8 kHz
Applicable Servomotor
R88M
-U03030WA
R88M
-U05030WA
R88M
-U10030WA
R88M
-U20030WA
R88M
-U30030WA
Applicable Servomotor wattage
30 W
50 W
100 W
200 W
300 W
Cable length between motor and
driver
20 m max.
Weight (approximate)
0.9 kg
1.2 kg
1.5 kg
Heating value
17 W
20 W
30 W
47 W
70 W
Capacity Max. pulse frequency
200 kpps
y
Position loop gain
1 to 500 (1/s)
Electronic gear
Electronic gear ratio setting range: 0.01
≤
(G1/G2)
≤
100
(G1, G2 = 1 to 65,535)
Positioning completed
range
0 to 250 command units
Feed-forward com-
pensation
0% to 100% of speed command amount (pulse frequency)
Bias setting
0 to 450 r/min
Position acceleration/de-
celeration time constant
0 to 64.0 ms (The same setting is used for acceleration and deceleration.)
Specifications
Chapter 5







































































