




























6 OPTIONS AND PERIPHERAL EQUIPMENT
6.12 Power factor improving AC reactor
237
6
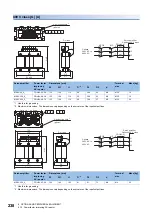
*1 Use this for grounding.
*2 Maximum dimensions. The dimensions vary depending on the curvature of the input/output lines.
200 V class [WG]
When using a combination of the rotary servo motor, linear servo motor, and direct drive motor, select a power factor
improving AC reactor tentatively, assuming one type of the servo motors is used for 2 or 3 axes. After the tentative selections
are made for all types of the servo motors, use the largest among all power factor improving AC reactors.
• Dimensions
Refer to the following.
• MR-J5W2-_G_
• MR-J5W3-_G_
Servo amplifier
Power factor
improving
AC reactor
Dimensions [mm]
Terminal
size
Mass [kg]
W
W1
H
D1
D2
d
MR-J5-350_
FR-HEL-7.5K
130
50
135
100
98
86
M6
M5
4.2
MR-J5-500_
FR-HAL-11K
160
75
164
111
109
92
M6
M6
5.2
MR-J5-700_
FR-HAL-15K
160
75
167
126
124
107
M6
M6
7.0
Total output of rotary servo
motors
Total continuous thrust of
linear servo motors
Total output of direct drive
motors
Power factor improving AC
reactor
450 W or less
150 N or less
100 W or less
FR-HAL-0.75K
From over 450 W to 600 W
From over 150 N to 240 N
From over 100 W to 377 W
FR-HAL-1.5K
From over 600 W to 1 kW
From over 240 N to 300 N
From over 377 W to 545 W
FR-HAL-2.2K
From over 1 kW to 2.0 kW
From over 300 N to 720 N
From over 545 W to 838 W
FR-HAL-3.7K
Total output of rotary servo
motors
Total continuous thrust of
linear servo motors
Total output of direct drive
motors
Power factor improving AC
reactor
450 W or less
150 N or less
FR-HAL-0.75K
From over 450 W to 600 W
From over 150 N to 240 N
378 W or less
FR-HAL-1.5K
From over 600 W to 1 kW
From over 240 N to 300 N
FR-HAL-2.2K
From over 1 kW to 2.0 kW
From over 300 N to 450 N
FR-HAL-3.7K
L1
L2
L3
R X
Z
S Y T
W ± 2
H
D1
W1
D2
Y
Z
S
T
MC
MCCB
FR-HAL
X
R
Terminal assignment
4-d mounting hole
(Varnish is removed only from bottom right (face and back side))
*1
D or less
Servo amplifier
3-phase 200 V class
3-phase
200 V AC to 240 V AC
Summary of Contents for MELSERVO-J5 MR-J5-G Series
Page 2: ......
Page 473: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 471 12 MEMO ...
Page 477: ......







































































