


























464
12 USING A FULLY CLOSED LOOP SYSTEM
12.5 Basic functions
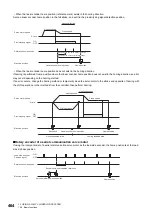
• When the linear encoder home position (reference mark) exists in the homing direction
Set one linear encoder home position in the full stroke, and set it in the proximity dog signal detection position.
• When the linear encoder home position does not exist in the homing direction
If homing is performed from a position where the linear encoder home position does not exist in the homing direction, an error
may occur depending on the homing method.
If an error occurs, change the homing method or temporarily move the servo motor to the stroke end opposite of homing with
the JOG operation or other methods from the controller, then perform homing.
■
Rotary encoder of a serial communication servo motor
If using the rotary encoder of a serial communication servo motor as the load-side encoder, the home position is at the load
side Z-phase position.
ON
OFF
0 r/min
Linear encoder home position
Home position
Homing speed
Creep speed
Homing direction
Proximity dog signal
Servo motor speed
Reference home position
Machine position
Equivalent to one servo motor revolution
Equivalent to n servo motor revolutions
ON
OFF
0 r/min
Stroke end
Home position
Homing speed
Creep speed
Homing direction
Proximity dog signal
Machine position
Linear encoder home position
JOG operation
Homing enabled area
Homing disabled area
Servo motor speed
ON
OFF
Servo amplifier power-on position
Home position
Load-side encoder
Z-phase signal
Reference home position
Machine position
Equivalent to one load-side revolution
Summary of Contents for MELSERVO-J5 MR-J5-G Series
Page 2: ......
Page 473: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 471 12 MEMO ...
Page 477: ......







































































