




























374
10 USING A LINEAR SERVO MOTOR
10.4 Basic functions
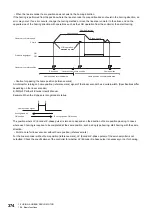
• When the linear encoder home position does not exist in the homing direction
If the homing is performed from the position where the linear encoder home position does not exist in the homing direction, an
error may occur. If an error occurs, change the homing method or move the linear servo motor to the stroke end on the
opposite side of the homing direction with operations such as the JOG operation from the controller, then start homing.
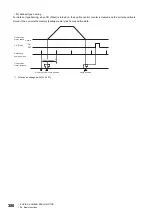
• Caution for passing the home position (reference mark)
An interval for turning on home position (reference mark) signal of the linear encoder has a certain width. (Specifications differ
depending on the linear encoder.)
MR-J5 Partner's Encoder User's Manual
Example: When the Z-phase is recognized at startup
The position where LZ (Encoder Z-phase pulse) is turned on depends on the direction of home position passing. In cases
where each homing is required to be completed at the same position, such as dog type homing, start homing with the same
direction.
• Point to note for linear encoder without home position (reference mark)
For the linear encoder without home position (reference mark), LZ (Encoder Z-phase pulse) of the servo amplifier is not
outputted. Check the specifications of the controller for whether LZ (Encoder Z-phase pulse) is necessary or not for homing.
ON
OFF
0 mm/s
Homing direction
Homing speed
Creep speed
Linear servo motor speed
JOG operation
Proximity dog signal
Linear servo motor position
Stroke end
Linear encoder home position
Home position
Home position returnable area
Home position non-returnable area
B
A
Home position signal
A recognized as
ON position
B recognized as ON position
Summary of Contents for MELSERVO-J5 MR-J5-G Series
Page 2: ......
Page 473: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 471 12 MEMO ...
Page 477: ......







































































