




























10 USING A LINEAR SERVO MOTOR
10.4 Basic functions
379
10
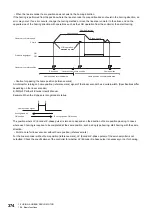
• Caution for passing the home position (reference mark)
An interval for turning on home position (reference mark) signal of the linear encoder has a certain width. (Specifications differ
depending on the linear encoder.)
MR-J5 Partner's Encoder User's Manual
Example: When the Z-phase is recognized at startup
The position where LZ (Encoder Z-phase pulse) is turned on depends on the direction of home position passing. In cases
where each homing is required to be completed at the same position, such as dog type homing, start homing with the same
direction.
• Point to note for linear encoder without home position (reference mark)
For the linear encoder without home position (reference mark), LZ (Encoder Z-phase pulse) of the servo amplifier is not
outputted. Check the specifications of the controller for whether LZ (Encoder Z-phase pulse) is necessary or not for homing.
■
Absolute position linear encoder
When using an absolute position linear encoder, the data set type homing can also be carried out.
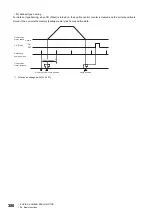
• For proximity dog type homing
For a proximity dog type homing, the nearest reference home position after proximity dog off is the home position. The linear
encoder home position can be set in any position. LZ (Encoder Z-phase pulse) is outputted based on the set value of [Pr.
PL01.2 Homing stop interval setting].
*1 This can be changed with [Pr. PL01].
B
A
Home position signal
A recognized as
ON position
B recognized as ON position
ON
OFF
1048576 pulses
*1
0 mm/s
Homing direction
Homing speed
Creep speed
Linear servo
motor speed
Proximity dog signal
Reference
home position
1048576 pulses × n
Linear servo
motor position
Linear encoder home position
Home position
Summary of Contents for MELSERVO-J5 MR-J5-G Series
Page 2: ......
Page 473: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 471 12 MEMO ...
Page 477: ......







































































