


























7 ABSOLUTE POSITION DETECTION SYSTEM
7.4 Absolute position detection system via communication [A]
317
7
■
Alarm cancellation
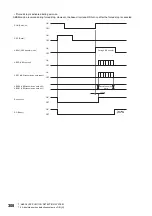
If an alarm occurs, detect ALM and turn off SON. After removing the cause of the alarm and deactivating the alarm, acquire
the absolute position data from the servo amplifier again with the following procedure.
Page 316 Sequence processing at power-on
■
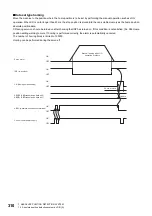
During forced stop release
Releasing the forced stop turns on the base circuit after approximately 200 to 450 ms, then RD turns on 5 ms after the base
circuit turns on.
Acquire the current position before RD triggers the position command.
• When power is switched on in a forced stop status
ON
100 ms
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
5 ms
SON (Servo-on)
RES (Reset)
Base circuit
ALM (Malfunction)
RD (Ready)
Absolute position data
command transmission
Absolute position data
reception
Current position change
Absolute position
data
Current position
Pulse train command
Acquire the absolute position data
within this period.
OFF
ON
OFF
ON
OFF
ON
OFF
ON
5 ms
Power supply
SON (Servo-on)
ON (Disabled)
EM2
(Forced stop 2)
OFF (Enabled)
Approximately 200 to 450 ms
Base circuit
RD (Ready)
Absolute position data
command transmission
Absolute position data reception
Current position change
Current position
Absolute position
data
Pulse train command
Acquire the absolute position data
within this period.
Summary of Contents for MELSERVO-J5 MR-J5-G Series
Page 2: ......
Page 473: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 471 12 MEMO ...
Page 477: ......







































































