


























324
8 USING STO FUNCTION
8.3 Connection example
8.3
Connection example
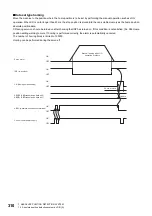
Precautions for compliance with stop category 1 (IEC/EN 60204-
1)
• Before turning off STO (STO1 and STO2), stop the servo motor in the servo-off state or by turning off EM2
(Forced stop 2) (delay by SS1). Configure an external sequence that has the timings shown below by using
an external device.
• If STO is turned off during operation, the servo motor stops with the dynamic brake stop (stop category 0).
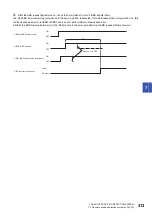
Precautions for compliance with stop category 0 (IEC/EN 60204-
1)
• Before turning off STO (STO1 and STO2), make the servo-off state or turn off EM1 (Forced stop 1). If servo
parameter "STO timing error selection" is set to "1 (Not detected)", wiring to EM1 can be omitted. Configure
an external sequence that has the timings shown below by using an external device.
ON
OFF
STO1/STO2
ON
OFF
EM2
0 r/min
Servo motor speed
ON
OFF
EM1
ON
OFF
STO1/STO2
0 r/min
Servo motor speed
Summary of Contents for MELSERVO-J5 MR-J5-G Series
Page 2: ......
Page 473: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 471 12 MEMO ...
Page 477: ......







































































