





























Device control
State diagram
State transitions of the drive controller
8
99
KHB 13.0003-EN
2.0
8.1.4
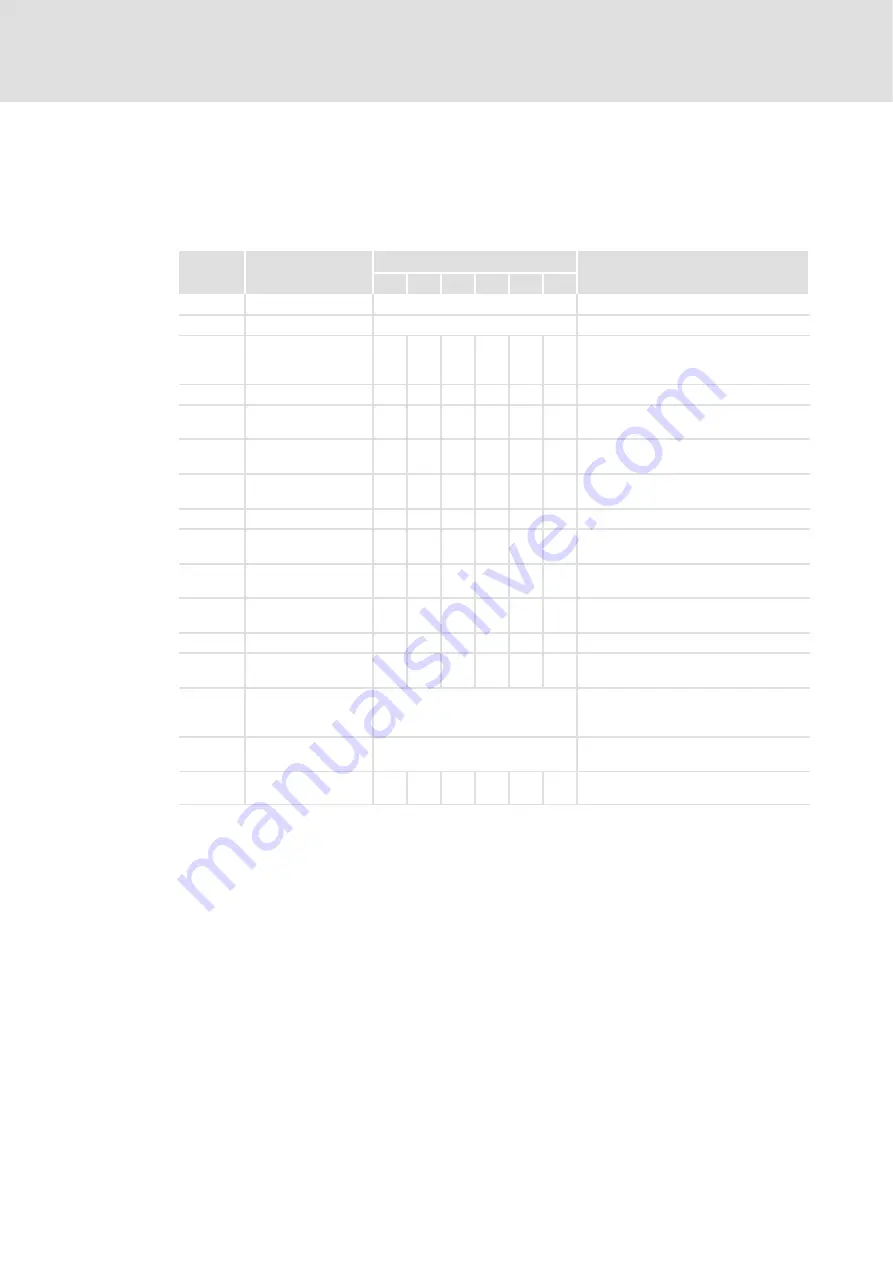
State transitions of the drive controller
The following table lists all states and their meaning. Please observe that bit 15 of the
control word remote_request must always be set to 1 to ensure the parameterisation
authority via the CAN bus.
Transition Command
Control word (bits)
Action
15
7
3
2
1
0
0
Switched on or reset Internal transition
Start self-test.
1
Self-test successful
Internal transition
Activation of CAN communication.
2
Shutdown and
controller and power
stage enable
1
X
X
1
1
0
None
3
Switch on
1
X
X
1
1
1
Power stage is switched on.
4
Enable operation
1
X
1
1
1
1
Control according to the selected
operating mode.
5
Disable operation
1
X
0
1
1
1
Motor is decelerated and energised at
standstill.
6
Shutdown
1
X
X
1
1
0
Power stage is disabled. Motor can be
freely rotated.
7
Quick stop
1
X
X
0
1
X
None
8
Shutdown
1
X
X
1
1
0
Power stage is disabled. Motor can be
freely rotated.
9
Disable voltage
1
X
X
X
0
X
Power stage is disabled. Motor can be
freely rotated.
10
Disable voltage
1
X
X
X
0
X
Power stage is disabled. Motor can be
freely rotated.
11
Quick stop
1
X
X
0
1
X
Braking is activated.
12
Disable voltage or
braking completed
1
X
X
X
0
X
Power stage is disabled. Motor can be
freely rotated.
13
Error occurred
Internal transition
With non-critical errors, response
according to fault_reaction_option_
code. With critical errors, transition 14.
14
Error handling
completed
Internal transition
Power stage is disabled. Motor can be
freely rotated.
15
Fault reset and error
removed
1
0 ->
1
X
X
X
X
Error acknowledgement (with rising
edge).
Tab. 12
Status transitions of the controller
X not relevant







































































