




























User Manual Of EL7-EC** AC Servo
231
2.
When actual velocity doesn’t reach velocity limit yet, Except for position loop gain,
velocity loop gain and feedforward gain, parameter adjustments as per velocity
control mode.
If there is no velocity limit and control is through torque command, please deactivate
torque and notch filter, set velocity limit to max. value and increase velocity loop gain to
as high as possible.
6.10 Safety Functions
External brake deactivation output signal BRK-OFF
Please refer to Pr4.11 to set up the I/O output function parameters. When enabled and
timing conditions are fulfilled, the set I/O output will deliver ON signal.
Pr4.37
Name
Motor power-off delay time
Mode
F
Range
0~3000
Unit
1ms
Default 100
Index
2437h
Activation
Immediate
To set delay time for holding brake to be activated after motor power off to prevent axis
from sliding.
Pr4.38
Name
Delay time for holding brake
release
Mode
F
Range
0~3000
Unit
1ms
Default 0
Index
2438h
Activation
Immediate
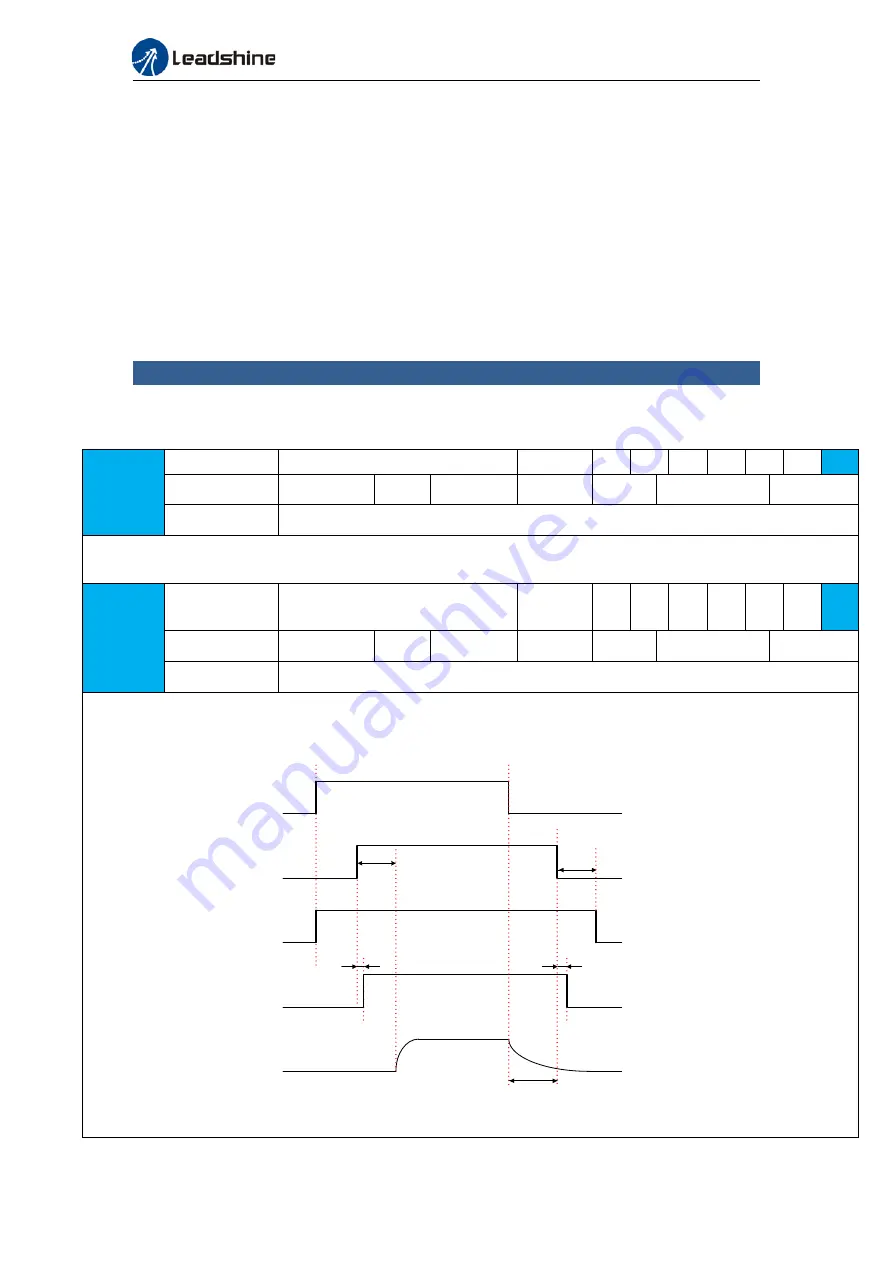
To set delay time for holding brake to be released after motor power on. Motor will
remain at current position and input command is masked to allow holding brake to
be fully released before motor is set in motion.
SRV_ON
BRK_OFF
Motor Power
Actual holding
brake status
Motor
Velocity
Braked
Released
Braked
*1
*2
*2
*3
*4
Brake released
(BRK_ON)
t
OFF
ON
Off
Brake
ON
off
On
*1: Delay time set in Pr4.38
*2: Delay time from the moment BRK_OFF signal is given until actual holding brake is







































































