





























User Manual Of EL7-EC** AC Servo
214
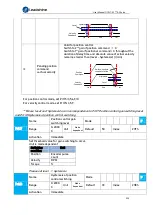
Affecting conditions
Load inertia
・
If inertia is less than 3 times or over 20 times of rotor inertia.
・
Changes in load inertia
Load
・
Very low mechanical stiffness
・
If gear backlash is a non-linear property
Motion
・
Velocity less than 100r/min or continuously in low velocity mode
・
Acc-/deceleration to 2000r/min within 1s.
。
・
Acc-/deceleration torque lower than eccentric load, frictional torque.
・
Velocity < 100r/min, acc-/deceleration to 2000r/min within 1s but not
longer than 50ms
To enable automatic gain adjustment:
1.
Disable the servo driver.
2.
Set Pr0.02 = 0x01/0x11 or 0x02/0x12. Then, set Pr0.03
3.
Servo enabled. Run motion as normal to start measuring load properties.
Related parameters will be automatically set.
4.
Increase motor responsiveness by increasing Pr0.03. Please check if there is
any vibration before setting Pr0.03 to max. value.
5.
Save the parameters.
Please take note:
- Please stop the motor before modifying any parameter. Pr0.02 only takes effect after
saving modified parameter values into EEPROM and restarting the driver.
- After enabling the servo driver for the first time or when increasing Pr0.03,
mechanical noise or vibration might occur for the first run, it is normal. If it persists,
please set Pr0.03 to lower value.
Parameters that change in accordance to real time gain adjustment
No.
Parameters Label
Remarks
1
Pr1.00
1
st
position loop gain
When stiffness setting is valid,
parameters will be updated to
match stiffness value
2
Pr1.01
1
st
velocity loop gain
3
Pr1.02
1
st
velocity integral time
constant
4
Pr1.03
1
st
velocity detection filter
5
Pr1.04
1
st
torque filter
6
Pr1.05
2
nd
position loop gain
7
Pr1.06
2
nd
velocity loop gain
8
Pr1.07
2
nd
velocity integral time
constant
9
Pr1.08
2
nd
velocity detection
filter
10
Pr1.09
2
nd
torque filter







































































