





























55
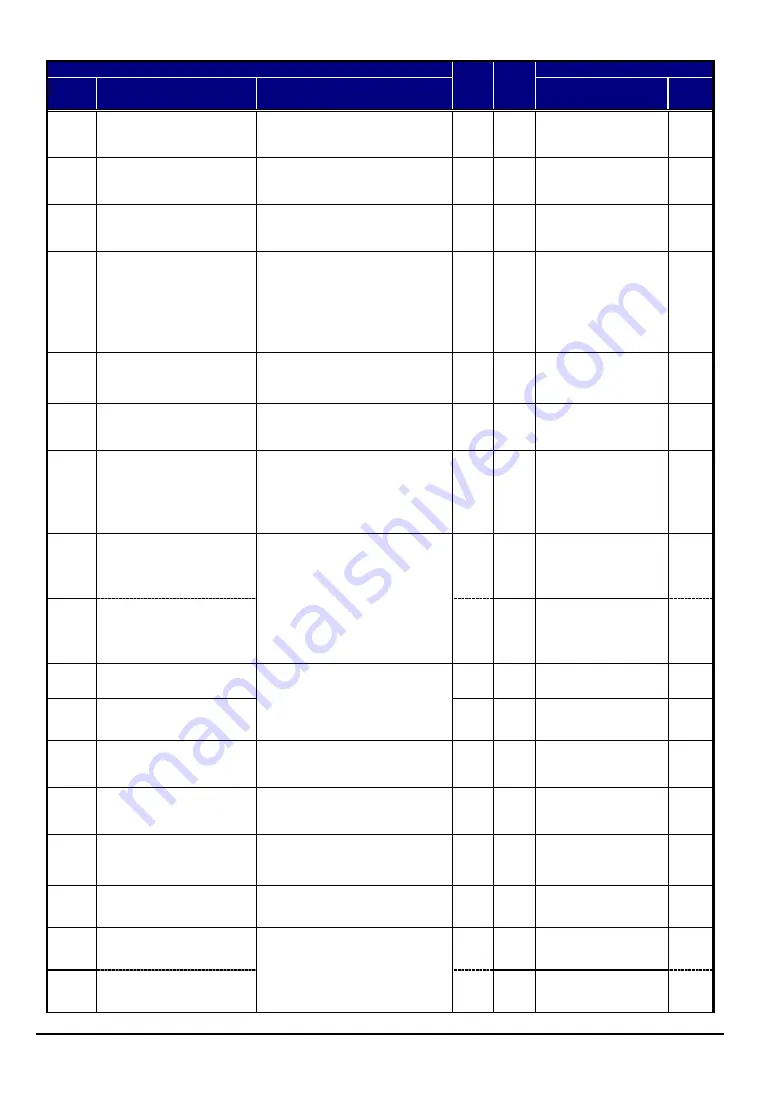
“A” Function
A
B
Defaults
Func.
Code
Name
Description
Initial data
Units
PID integral time
constant
Integral time constant has a
range of 0.0 to 3600 seconds
1.0
s
PID derivative time
constant
Derivative time constant has a
range of 0.00 to
100.0seconds seconds
0.00
s
PV scale conversion
Process Variable (PV), scale
factor (multiplier), range of
0.01 to 99.99
1.00
PV source
Selects source of Process
Variable (PV), option codes:
[OI] terminal (current in)
[O] terminal (voltage in)
Modbus network
Calculate function output
00
Reverse PID action
Two option codes:
PID input = SP-PV
PID input = -(SP-PV)
00
PID output limit
Sets the limit of PID output as
percent of full scale,
range is 0.0 to 100.0%
0.0
%
PID feed forward
selection
Selects source of feed
forward gain, option codes:
Disabled
[O] terminal (voltage in)
[OI] terminal (current in)
00
AVR function select
Automatic (output) voltage
regulation, selects from three
type of AVR functions, three
option codes:
AVR enabled
AVR disabled
AVR enabled except
during deceleration
02
AVR function select,
2
nd
motor
02
AVR voltage select
200V class inverter settings:
200/215/220/230/240
400V class inverter settings:
380/400/415/440/460/480
230/
400
V
AVR voltage select,
2
nd
motor
230/
400
V
AVR filter time constant
Define the time constant of
the AVR filter, range is 0 to
10 sec.
0.300
s
AVR deceleration gain
Gain
adjustment
of
the
braking performance, range is
50. to 200.%
100.
%
Energy-saving
operation mode
Two option codes:
Normal operation
Energy-saving operation
00
Energy-saving mode
tuning
Range is 0.0 to 100 %.
50.0
%
Acceleration time (2)
Duration of 2
nd
segment of
acceleration, range is:
0.00 to 3600 sec.
10.00
s
Acceleration time (2),
2
nd
motor
10.00
s







































































