





























Documentation HG G-73650ZD | English, Revision 05 | Date: 09.03.2017 | www.goetting-agv.com
115
Chapter 6: CAN Bus Protocol
6.3.2 SPS Control Box
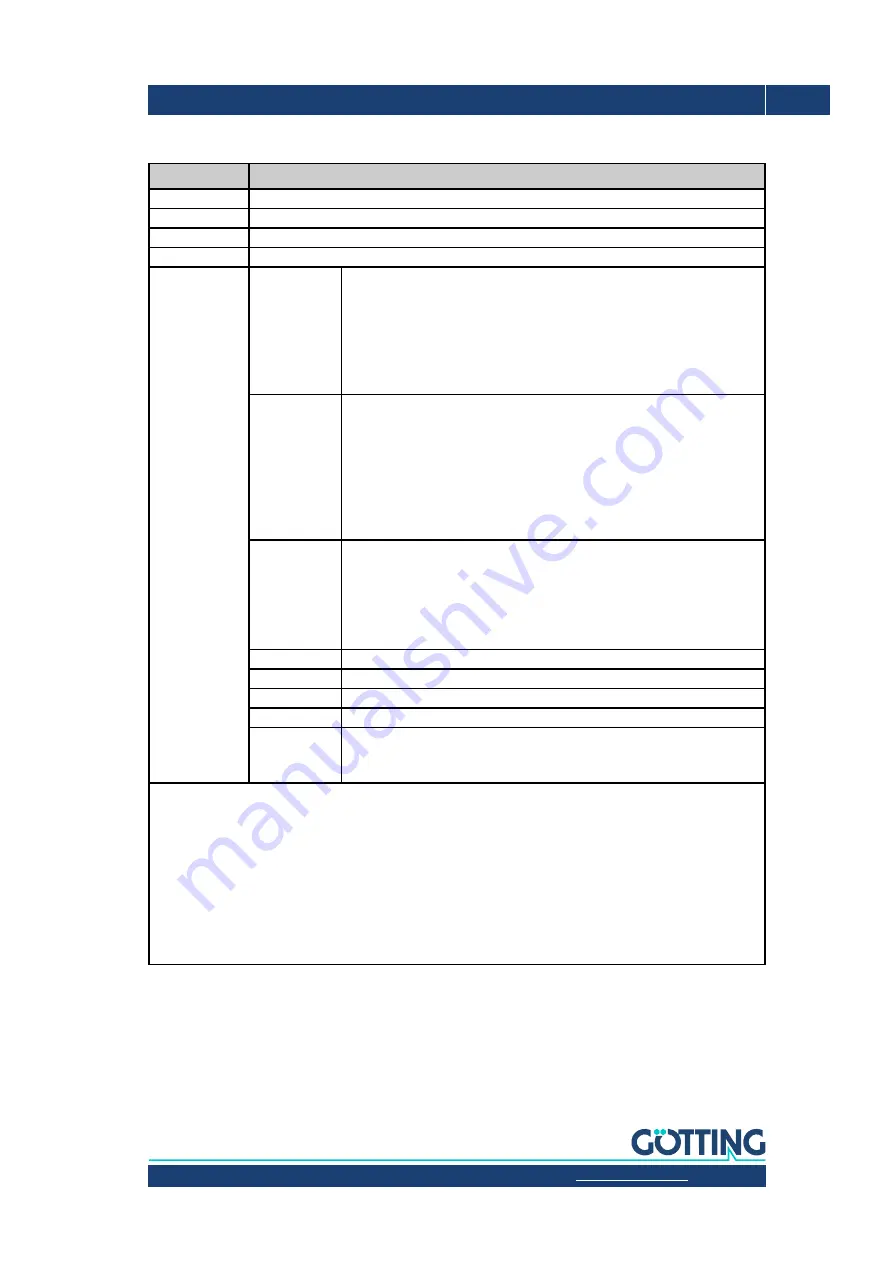
Message
Control Box
Transmitter
PLC / Vehicle
Receiver
Vehicle Guidance Controller (VGC)
Period
10 ms
ID
Parameter (307h / 775d)
Data
byte 0
Operation Mode
0 = manual driving
1 = automatic driving
2 = Remote control
3 = Parameter Test
4 = Vector steering absolute
5 = Vector steering relative
byte 1
bit-0 –
bit-1 –
bit-2 Offset right
bit-3 Offset left
bit-4 –
bit-5 Error Acknowledge *)
bit-6 Emergency Stop active **)
bit-7 Emergency Stop Acknowledge *)
byte 2
Lowbyte Speed Limitation
Format: 16-bit
Resolution: 1 mm/s
Value range: 1..65535mm/s
Value 0: Speed Limit not used
Offset: 0
byte 3
Highbyte Speed Limitation
byte 4
–
byte 5
Request Count of Error (Bits 0 and 1)
byte 6
Request Count of Segment search
byte 7
Message-Counter
The Message-Counter will be increased with each transmission as sign
of operation.
*) By setting „Error Acknowledge/Emergency Stop Acknowledge“ to 1 all errors in the Vehicle Guidance
Controller are cleared. This helps to reset errors where the reason for the error has been removed. All
errors that are still valid will reappear again. Make sure to only set these Bits to 1 when needed and to
set them back to 0 afterwards.
Most of the errors that can appear are self-resetting once the reason disappears. Emergency stops have
to be cleared by sending „Emergency Stop Acknowledge“ once.
**) When the PLC sets the bit „Emergency Stop active“ the accuracy is decreased artificially. This
ensures that the next position is referenced by measuring transponders or GPS. It is strongly recom-
mended to re-position the vehicle onto the track after emergency stops. Each emergency stop means
that the wheels might have blocked which leads to a less accurate position calculation!
Table 37
CAN Rx Telegram: Control Box







































































