





























Documentation HG G-73650ZD | English, Revision 05 | Date: 09.03.2017 | www.goetting-agv.com
92
Chapter 5: Commissioning
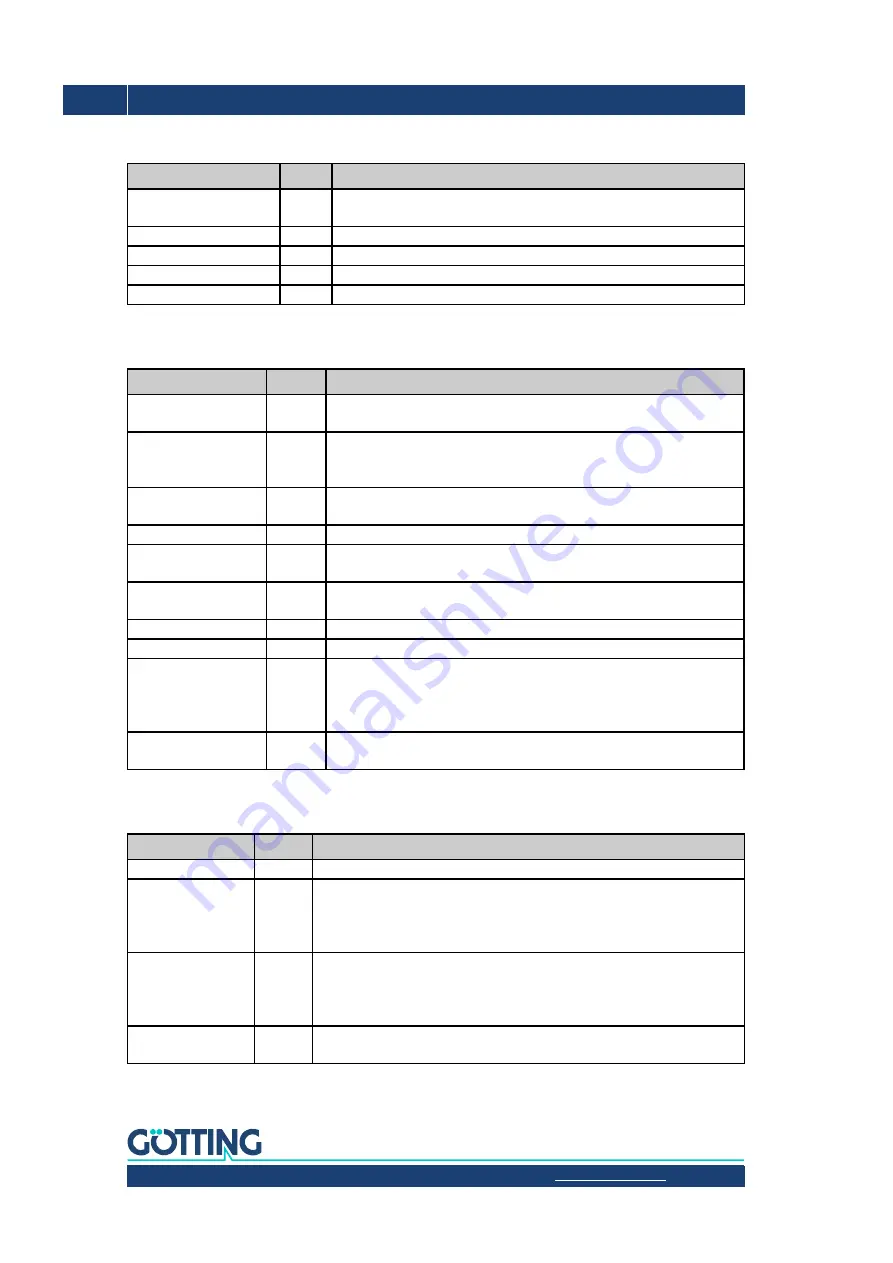
5.4.5 Configuration –> Accuracy
5.4.6 Configuration –> Steer Controller
5.4.7 Configuration –> Speed Controller
Parameter
Value
Explanation
Accuracy Attribute 0
1,000
To enable relatively free movement, the accuracy limits are set rela-
tively high
Accuracy Attribute 1
2,000
see above
Accuracy Operation
2,000
see above
Deviation Attribute 0
1,000
see above
Deviation Attribute 1
1,000
see above
Table 21
Example commissioning parameters in Config. Accuracy
Parameter
Value
Explanation
Forward Dis. Fix
0.300
For a vehicle of this size and steering with approx. 40
o
/s, 0.3 metres at
a standstill should be an acceptable starting value
Forward Dis. Var
0.200
Increases the distance to the destination point at 1 m/s to 0.5 metres
(calculation after 0.3 m (Forward Dis. Fix) + 1 m/s * 0.2 (Forward Dis.
Var))
Approach Lim. Fix
8,000
Vehicle moves with a maximum of 8
o
back to the track. Initial starting
value that can be optimised later
Approach Lim. Var
0,000
Can initially remain 0
Steer Angle Max
30,000
Limits the angles of the steering. To date, only in the remote control
mode and with presetting in the 'Parameter Test' menu
Ramp
0,100
Limits the angles of the steering. To date, only in the remote control
mode and with presetting in the 'Parameter Test' menu
Speed Spot Turn
0,200
Speed during the spot turn (fastest wheel)
Virtual Point Front
1,600
The point at the front to be regulated is placed near the vehicle front
Virtual Point Rear
-0,800
The point at the rear to be regulated is not as far away from the rigid
axle as the front point, but is significantly further way than the forks
protrude (a compromise). The vehicle regulates backwards faster
onto the track and therefore significantly more "nervous".
Time Forward
0,000
still has to be determined. At low speed, this parameter does not have
a very strong effect.
Table 22
Example commissioning parameters in Config. Steer Controller
Parameter
Value
Explanation
Ramp
0. 100
0. 1 m/s faster every second; braking double the deceleration
Vmax forward
0.500
At the start, driving should be slow.
As in this example the start is in the simulation, 0.5 m/s is OK.
For the
first trips with a real vehicle, this parameter should be set to
0.1 m/s.
Vmax backward
-0.500
At the start, driving should be slow.
As in this example the start is in the simulation, 0.5 m/s is OK.
For the
first trips with a real vehicle, this parameter should be set to
0.1 m/s.
Scaling Speed
0.1
Initially, 10 % of the final speed from the segment should be enough.
This can be increased as commissioning progresses.
Table 23
Example commissioning parameters in Config. Speed Controller







































































