





























7
Dynamic response
Festo – GDCP-CMMP-M3-FW-EN – 1203NH
75
The motor controller CMMP-AS-...-M3 also has a sine-wave modulation or, alternatively, an extended
sine-wave modulation (with third harmonic wave). This increases the effective converter output
voltage. The modulation type can be selected using the parameterising software. The standard setting
is extended sine-wave modulation.
7.3
Variable cycle times, current, speed and position controller
The motor controllers of the CMMP-AS-...-M3 series permit a switchable current control cycle time.
From these settings are derived the cycle times for the speed and position controller as well as the
interpolation time.
Faster cycle times permit lower reaction times and an improved control dynamic (depending on the
application, higher possible closed-loop gain or lower “overshooting” of the position actual values).
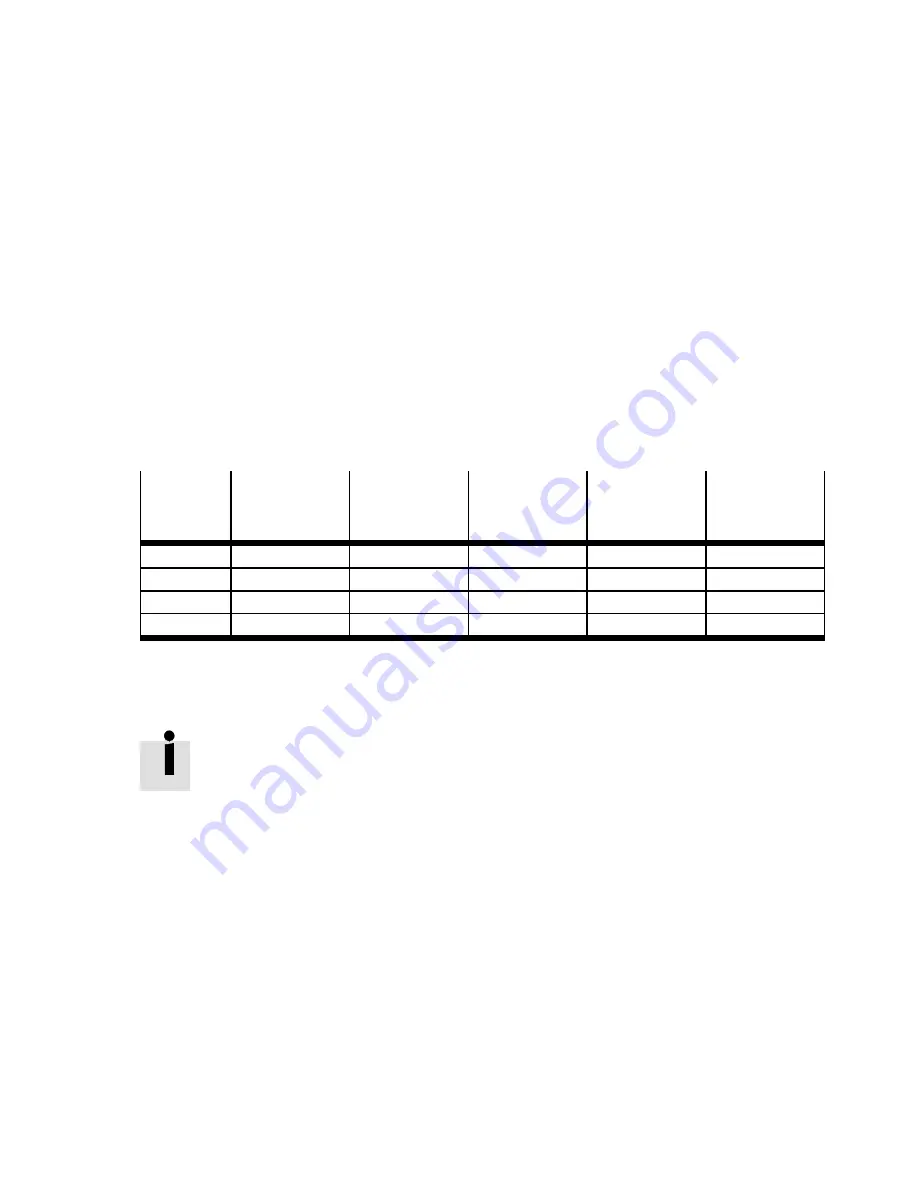
The following table includes the pulse-width modulation frequencies supported by the CMMP-AS-...-M3
and their related cycle times:
PWM
frequency
Scanning
frequency of
current control
Cycle time of
current control
Cycle time of
speed
adjustment
Cycle time of
position
control
Interpolation
time
4 kHz
8 kHz
125 μs
250 μs
500 μs
1000 μs
8 kHz
8 kHz
125 μs
250 μs
500 μs
1000 μs
8 kHz
16 kHz
62.5 μs
125 μs
250 μs
500 μs
16 kHz
16 kHz
62.5 μs
125 μs
250 μs
500 μs
Tab. 7.1
PWM frequencies and cycle times
The PWM frequency can be set in the parameterisation software FCT with the option “Half output stage
frequency”.
With higher PWM frequencies, the result is reduced nominal/peak currents of the power
sections. Derating tables
Technical data GDCP-CMMP-M3-HW-....
Summary of Contents for CMMP-AS-***-M3 Series
Page 131: ......





















































