

























2
Operating modes and functions
Festo – GDCP-CMMP-M3-FW-EN – 1203NH
11
2
Operating modes and functions
2.1
Overview
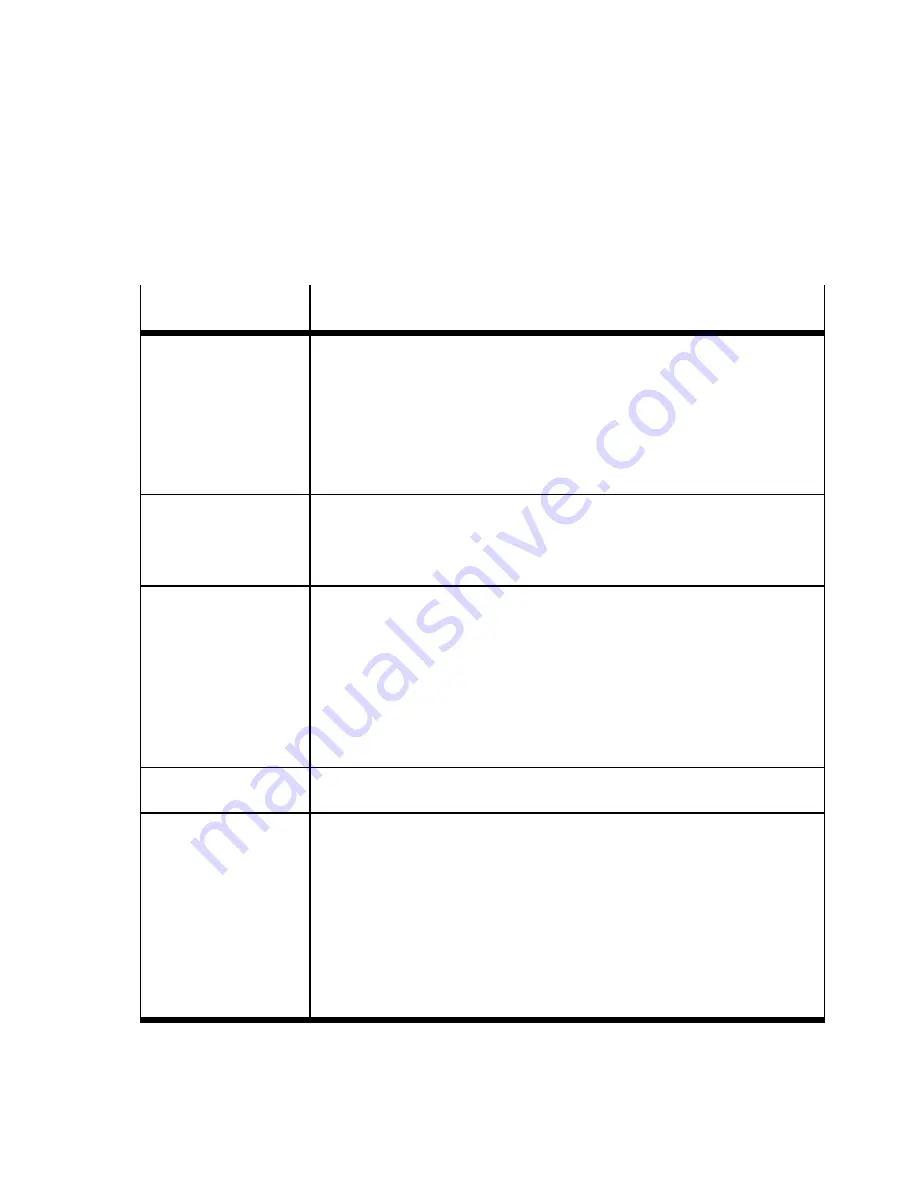
The following operating modes are available to support your application.
Operating mode/func-
tions
Description
Profile Positioning
Mode
(Profile Position Mode)
Operating mode for executing a positioning record (record selection) or a
positioning task (direct mode). In addition to operation with speed control,
a higher-level position controller (setpoint value generator) is active; it
processes deviations between setpoint position and actual position and
converts it into corresponding setpoint specifications for the speed control-
ler. For position control, the current settings for speed, acceleration, brak-
ing deceleration, etc. are taken into account.
Speed-controlled
operation
(Profile Velocity Mode)
Operating mode for executing a positioning record (direct mode). Regula-
tion in accordance with speed setpoint values and profiles. In speed-con-
troller operation, current limitation can be activated through specification
of a force/torque limit value.
Force/torque
operation
(Profile Force/Torque
Mode)
Operating mode for executing a positioning record (direct mode) with
force/torque control (current control). This operating mode permits spe-
cification to the controller of an external force/torque setpoint value (relat-
ive to the motor current). All specifications on forces/torques refer to the
motor nominal torque or the motor nominal current. Since force/torque are
proportional to the motor current, only the current regulator is activated in
this operating case. In addition, speed limiting can be activated through
specification of a limit value.
Homing
(Homing)
Positioning mode with a sequence established through the homing method
for definition of the mechanical reference system (homing point).
Interpolated
positioning mode
(Interpolated position
mode in accordance
with CiA 402)
Positioning mode with a sequence established through the homing method
for definition of the mechanical reference system (homing point)
–
Travelling along trajectory curves
–
Coupling of axes for multiple axis systems
–
Axis error compensation.
The movement is parameterised for several axes in advance in the shape of
data points (position, speed, time) and loaded into the controllers.
Between the data points, the various axes interpolate independently and
work off the movement profile synchronously in time.
Tab. 2.1
Overview of operating modes
Summary of Contents for CMMP-AS-***-M3 Series
Page 131: ......





















































