





























2
Product description
Festo – GDCP-CMMO-ST-EA-SY-EN – 2017-05c – English
35
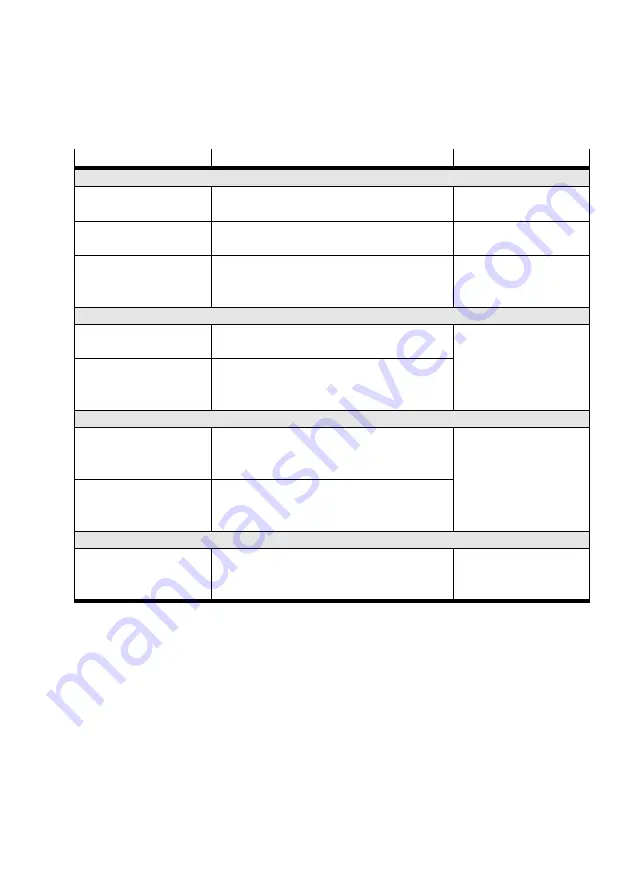
Homing parameters
Target and direction of reference travel are specified by the homing method. Depending on the homing
method, other parameter settings may be required prior to reference travel:
Parameters
Description
Method
Homing
Search speed
(Search Velocity)
Velocity for searching travel to the defined
target.
–
Homing Switch
–
Stop
Creep speed
(Crawling Velocity)
Speed for crawling speed to the homing point
–
Homing Switch
Acceleration
(Acceleration)
Acceleration/deceleration for all phases of
reference travel
–
Position Actual Value
–
Homing Switch
–
Stop
Travel to the axis zero point
travel speed
(Drive Velocity)
Positioning speed for the option “Drive to axis
zero point”
–
Position Actual Value
–
Homing Switch
–
Stop
Axis zero point
(Axis Zero Point)
The distance of the axis zero point from the
reference point in positive or negative
direction (offset)
Stop recognition (closed-loop operation)
Force/torque limit
(Force Limit/Torque
Limit)
Percentage figure for force (related to
maximum current) at which a stop is detected.
–
Stop
Damping time
(Message Delay)
Time period during which the force must be
greater than the force limit in order for a stop
to be identified.
Time-out (open-loop operation)
Time-out
If a switch has not been found after a certain
period of time, the homing run is aborted with
an error message (0x22).
–
Reference switch
without index
Tab. 2.28 Homing parameters
è
FCT [...][Axis][Homing] Method
Recommendation for parameterisation:
Select low search/crawl speed to enable the target points to be identified as accurately as pos
sible.
Set deceleration high enough to prevent the target points from being overrun during the search
run.





















































