





























84 | © Danfoss | August 2018
AQ00000211
ENGINEERING TOMORROW
10.3
STW IN USE AND ACTIVATION THRESHOLD
A steering wheel signal filter has been applied to the PVED-CLS’s steering wheel control algorithm, as a part of risk
mitigation, to avoid unintended spool actuation, etc. when driving on bumpy-ground.
Practically, any steering wheel signals, i.e. steering wheel signal where the steering angle velocity is below the value in
P3521, will be disregarded.
Furthermore, any other steering devices can be disengaged and returned back to STW mode (only hydraulic steering) by
activating/turning the steering wheel. In OSPE, EHi-E and EHPS system, the PVED-CLS detects that the steering wheel
is in use when both the threshold P3583 and P3584 are being exceeded. Transition to the Auto-guidance or AUX program
is allowed if steering wheel velocity is lower than STW in use – velocity threshold i.e. P3583. To disengage auto-guidance
or AUX program, both the steering wheel velocity and steering wheel position change shall exceed the values in P3583
and 3584 respectively. (In EHI-H system, the disengage is performed by IMD function unlike above function)
Name
A
ddr
es
s
D
at
a t
yp
e
U
ni
t
Description of parameter
U
se
r
Range
D
a
nf
o
ss
de
fa
ul
t
val
u
e
S
a
fet
y
cri
ti
ca
l
p
a
ra
m
et
ers
‘
S
’
Mi
n
.
M
ax.
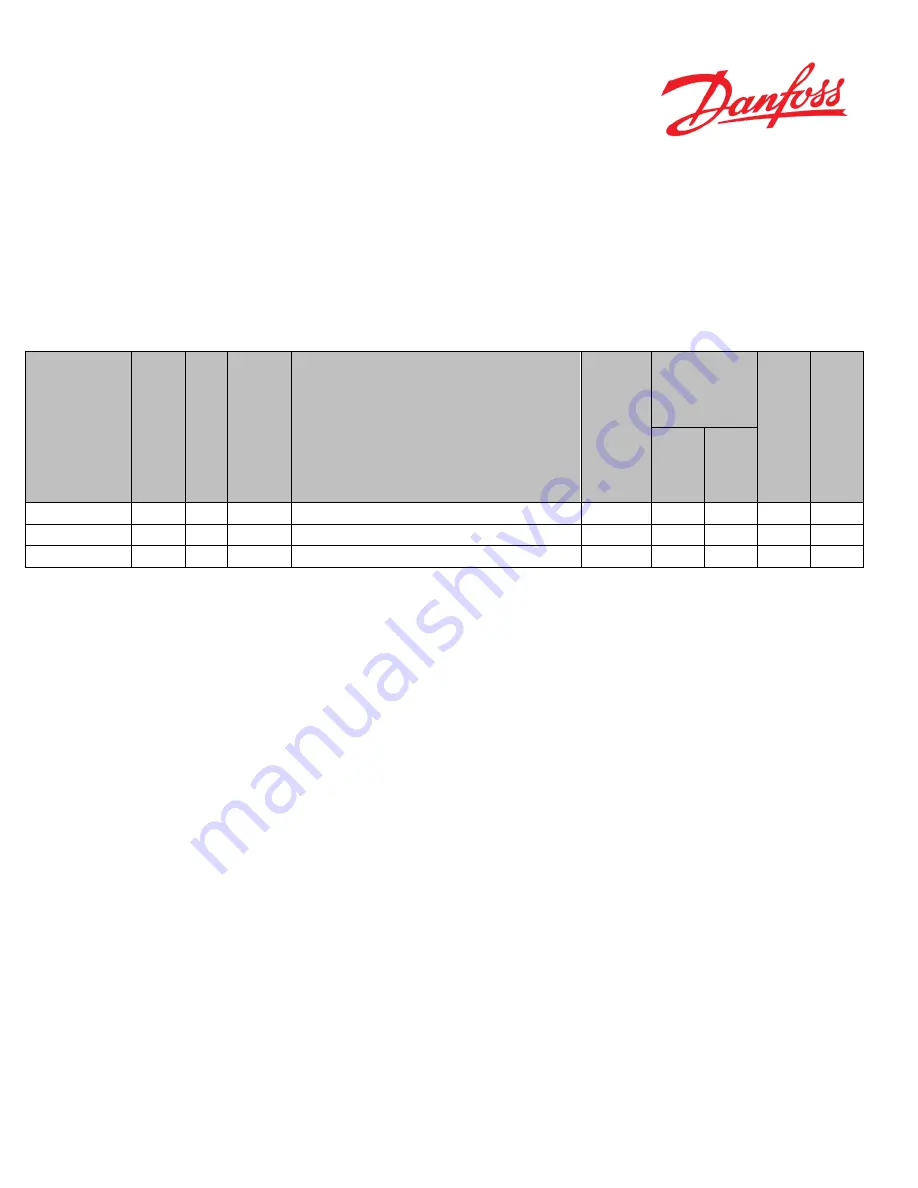
STW - Steering wheel
no-activation threshold
P3521
U8
dRpm
Min steering angle velocity value below which the angle velocity of 0 is
used by the STW control algorithm
OEM
0
100
5
STW in use - Velocity
threshold
P3583
U8
dRpm
Steering wheel velocity threshold
OEM
1
100
5
S
STW in use - Angle
threshold
P3584
U8
Deg
Steering wheel position change threshold, from last detected position at 0
RPM
OEM
0
45
10
S
Table 36
10.4
VEHICLE SPEED DEPENDENT FAST-STEERING
The PVED-CLS has 5 different steering wheel programs, where the wanted number of turns lock-to-lock can be set up,
on the steering wheel at a given vehicle speed (i.e. “Fast-steering”). Fast Steering is possible only in OSPE, EHi-E, EHPS
with SASA sensor.
The range is from 1 to 100 km/h for the parameters named
“Steering wheel program 1,2,3,4,5 - Vehicle speed @ Point
B,C”
and from 10 to 800 dec [Resolution = 0.01; 1turn = 100] for parameters named
“Steering wheel program 1,2,3,4,5
– No of turns @ Point A,B,C”
.
These parameters represent the three points on the curve below (Point A, B and C). The steering wheel control algorithm
will make linear interpolation in between each of the three points. It is allowed to move these three points in any direction,
limited by the following rules:
•
Point A is always specified at Vehicle speed = 0 km/h
•
Point C “No of turns” is valid for Point C “Vehicle speed” and vehicle speeds above Point C “Vehicle speed”
•
Point A “No of turns” ≤ Point B “No of turns” ≤ Point C “No of turns”
•
Point C “Vehicle speed” > Point B “Vehicle speed” > Point A “Vehicle speed”
Summary of Contents for PVED-CLS
Page 6: ...6 Danfoss August 2018 AQ00000211 ENGINEERING TOMORROW ...
Page 71: ... Danfoss August 2018 AQ00000211 71 ENGINEERING TOMORROW Figure 29 ...
Page 127: ... Danfoss August 2018 AQ00000211 127 ENGINEERING TOMORROW ...
Page 147: ... Danfoss August 2018 AQ00000211 147 ENGINEERING TOMORROW ...
Page 182: ...182 Danfoss August 2018 AQ00000211 ENGINEERING TOMORROW ...