
























2.4 Examples of Standard Connections between SERVOPACKs and Peripheral Devices
2-27
2
Selecting a SER
VOP
ACK
2.4
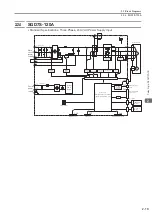
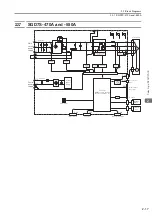
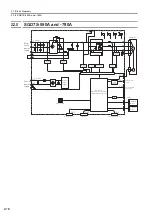
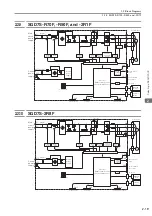
Examples of Standard Connections between SERVOPACKs and Peripheral Devices
•
Rotary Servomotors
*1.
This example is for a SERVOPACK with a three-phase, 200-VAC power supply input. The pin layout of the main
circuit connector depends on the voltage.
*2.
External Regenerative Resistors are not provided by Yaskawa.
*3.
The power supply for the holding brake is not provided by Yaskawa. Select a power supply based on the hold-
ing brake specifications.
If you use a 24-V brake, install a separate power supply for the 24-VDC power supply from other power sup-
plies, such as the one for the I/O signals of the CN1 connector.
If the power supply is shared, the I/O signals may malfunction.
Servomotor
Main Circuit Cable
Encoder Cable
Battery Case
Holding brake
power supply unit
* 3
Magnetic Contactor
(Wires required for a Servomotor with a Brake)
External
Regenerative
Resistor
* 2
Noise Filter
Molded-case
circuit breaker
Magnetic Contactor
I/O Signal Cable
SERVOPACK
Rotary Servomotor
Direct Drive Servomotor
Power supply
Three-phase, 200 VAC
* 1
(Used for an absolute
encoder.)
Computer
Computer Cable
External
Regenerative
Resistor Cable
Control
Power
Supply Cable
Digital
Operator
Digital Operator cable
Analog Monitor Cable
Ground
cable
SERVOPACK
main circuit wires
Support
Software
Servomotor
Main Circuit Cable
Encoder Cable
Sequence I/O
signal cable
Host controller
Serial command
communications cable
When a Safety Function Is Not Used:
When a Safety Function Is Used:
Safety function device
Leave the enclosed JZSP-CVH05-E
Safety Jumper Connector attached.
Safety Function Device Cable
CN5
CN3
CN7
CN12
CN1
CN8
CN2
R S T
CN11







































































