





























13.2 Homing
13.2.3 Homing Procedures
13-7
13
Operation with Digital I/O
13.2.3
Homing Procedures
Homing will start when the /HOME signal turns ON. Homing will be stopped if the /HOME sig-
nal turns OFF. If the /HOME signal turns ON while homing is stopped, homing will be restarted
from where it was stopped.
If a jog speed table operation is performed with the /JOGP or /JOGN signal or if the mode is
changed with the /MODE 0/1 signal while homing is stopped, homing will be canceled.
When PnB31 is set to 0000h (the current position when the power supply is turned ON is the
origin; homing is not executed), the origin position is defined as soon as the control power sup-
ply is turned ON.
The smaller of the settings of PnB29 and PnB2B is used as the acceleration and deceleration
rates for homing.
There are three different origin patterns depending on the homing method that is specified in
PnB31.
The v procedure for each method is given in this section.
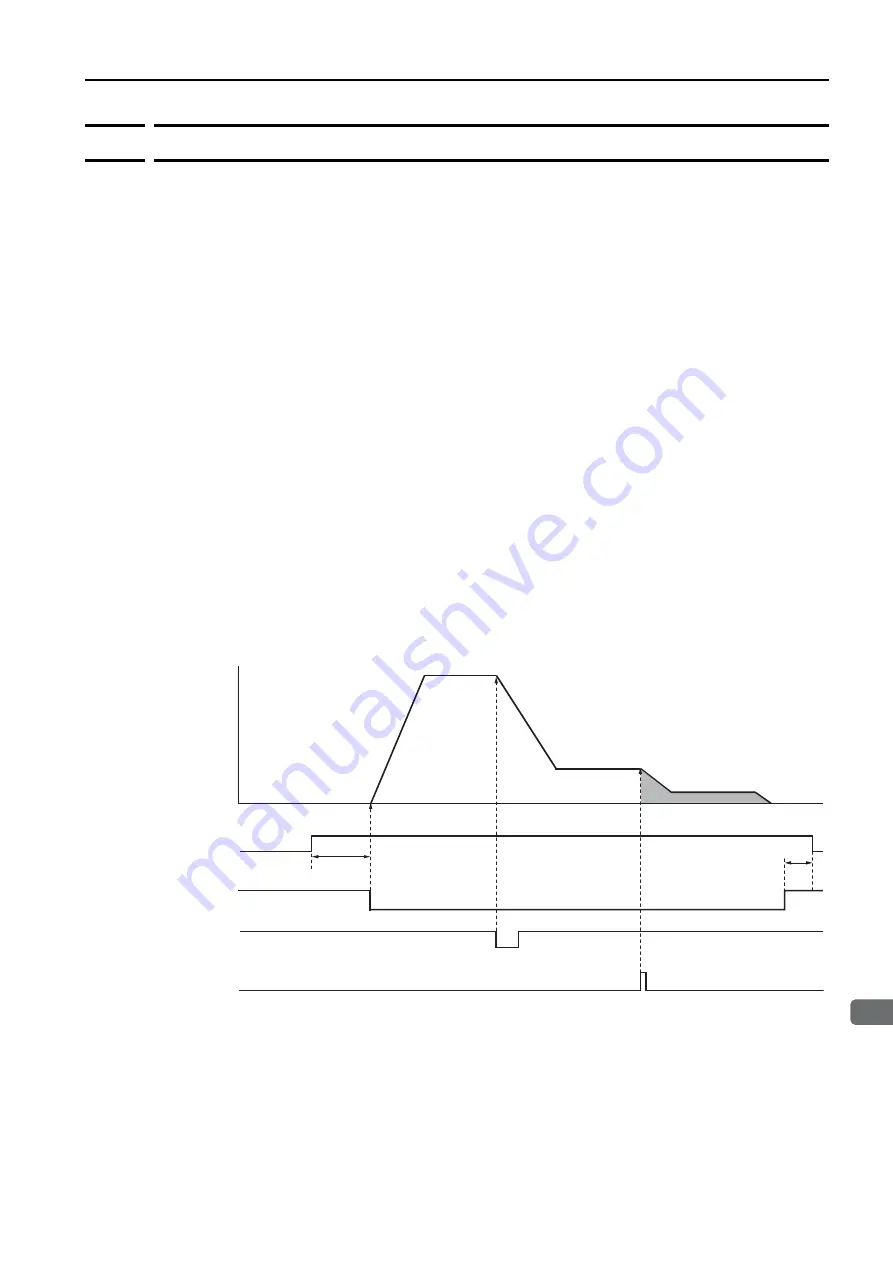
Using the /DEC Signal and Encoder Origin (Phase C)
for Homing (PnB31 = 0001h)
Turn ON the /HOME signal. Homing starts. The motor will rotate in the direction specified in
PnB32 (Homing Direction) at the speed specified in PnB33 (Homing Movement Speed).
When the /DEC signal turns ON, the motor changes to the approach speed.
When the encoder’s origin signal (phase C) is detected, the motor decelerates to the creep
speed.
Homing is completed after the motor moves the final travel distance. Set PnB25 to the value
of the current position where the motor is stopped.
/HOME
/DEC
/MODE 0/1
Operation
Pattern
Speed
Time
Homing movement speed
(PnB33)
Approach speed
(PnB35)
Creep speed
(PnB37)
Homing final travel distance (PnB39)
Encoder origin
(phase C)
4 ms min.
0 ms min.







































































