





























16.2 List of Parameters
16.2.2 List of Parameters
16-28
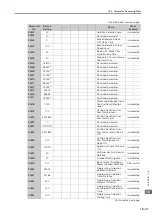
PnB1E
2
/S-RDY
0000h or
0001h
–
0000h
All
After
restart
Setup
PnB1F
2
Overtravel (OT) Stop
Method
0000h to
0002h
–
0000h
All
After
restart
Setup
PnB20
2
Moving Mode
0000h to
0003h
–
0000h
All
After
restart
Setup
PnB21
4
Linear coordinates
(PnB20 = 0000h): For-
ward Software Limit (P-
LS)
Rotational coordinates
(PnB20
≠
0000h): Last
Rotational Coordinate
-99999999 to
+99999999
*15
1 refer-
ence
unit
+99999999
All
After
restart
Setup
PnB23
4
Linear coordinates
(PnB20 = 0000h):
Reverse Software Limit
(N-LS)
Rotational coordinates
(PnB20
≠
0000h): First
Rotational Coordinate
-99999999 to
+99999999
*15
1 refer-
ence
unit
-99999999
All
After
restart
Setup
PnB25
4
When using an incre-
mental encoder:
Origin
When using an abso-
lute encoder:
Absolute Encoder Offset
-99999999 to
+99999999
*15
1 refer-
ence
unit
0
All
After
restart
Setup
page
12-2,
page
12-6,
page
13-5,
page
14-12
PnB27
4
Positioning/Registration
Speed
1 to
99999999
*15
1000
Refer-
ence
units/
min
1000
All
After
restart
Setup
PnB29
4
Acceleration rate
1 to
99999999
*15
1000
(Refer-
ence
units/
min)
/ms
1000
All
Immedi-
ately
Setup
PnB2B
4
Deceleration rate
1 to
99999999
*15
1000
(Refer-
ence
units/
min)
/ms
1000
All
Immedi-
ately
Setup
PnB2D
4
/INPOSITION Width
1 to 99999
Refer-
ence
unit
1
All
Immedi-
ately
Setup
PnB2F
4
/NEAR Width
1 to 99999
Refer-
ence
unit
1
All
Immedi-
ately
Setup
Continued on next page.
Continued from previous page.
Parameter
No.
Size
Name
Setting
Range
Setting
Unit
Default
Setting
Applicable
Motors
When
Enabled
Classi-
fication
Refer-
ence
0000h
When the SERVOPACK is ready, the /S-RDY signal turns ON (closes).
0001h
When the SERVOPACK is ready, the /S-RDY signal turns OFF (opens).
0000h
Stops the motor with the same method as when the servo is turned OFF (according to set-
ting of Pn001 = n.
X).
0001h
Stops motor immediately, and then changes motor state to servo lock.
0002h
Decelerates motor to a stop at deceleration rate set with PnB2B, and then changes motor
state to servo lock.
0000h
Sets coordinates to linear type.
0001h
Sets coordinates to rotary type. Moving mode is set as shortest path.
0002h
Sets coordinates to rotary type. Moving mode is always set as forward.
0003h
Sets coordinates to rotary type. Moving mode is always set as reverse.







































































