





























37
Unplugging the power cord directly from the wall outlet to
shut down the system may result in damage to the file
system of the control box, which may result in robotic arm
malfunction.
2. Electrical Interface
2.1.AC Control Box
2.1.1.
Connect the Control Box to the Robotic Arm
1. The robotic arm power supply cable connects the power port of the
robotic arm and the ROBOT power port of the control box.
2. The robotic arm signal cable is connected to the signal interface of
the robotic arm and the ROBOT signal interface of the control box.
Содержание 850
Страница 1: ...1...
Страница 72: ...72 4 The control box PC and network switch are connected by Ethernet ca ble...
Страница 74: ...74 Step3 Open the Properties Step4 Open the IPV4...
Страница 89: ...89 Cancel Cancel the selection Save Save the modified data Discard Discard the modified data...
Страница 145: ...145 1 6 6 GPIO Control Box and End tool interface...
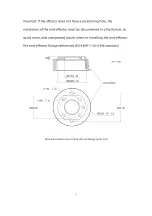
Страница 149: ...149 1 6 7 End Effector...
Страница 197: ...197 State 6 Stop Generally use studio will generate state 6 and state 6 is also a kind of stop...




































































