





























122
trajectory planning, which needs to be solved by inverse kinematics.
Therefore, there may be no solution, multiple solutions, and
approximated solutions; and due to the nonlinear relationship between
the joint space and Cartesian space, the joint motion may exceed its
maximum speed and acceleration limits.
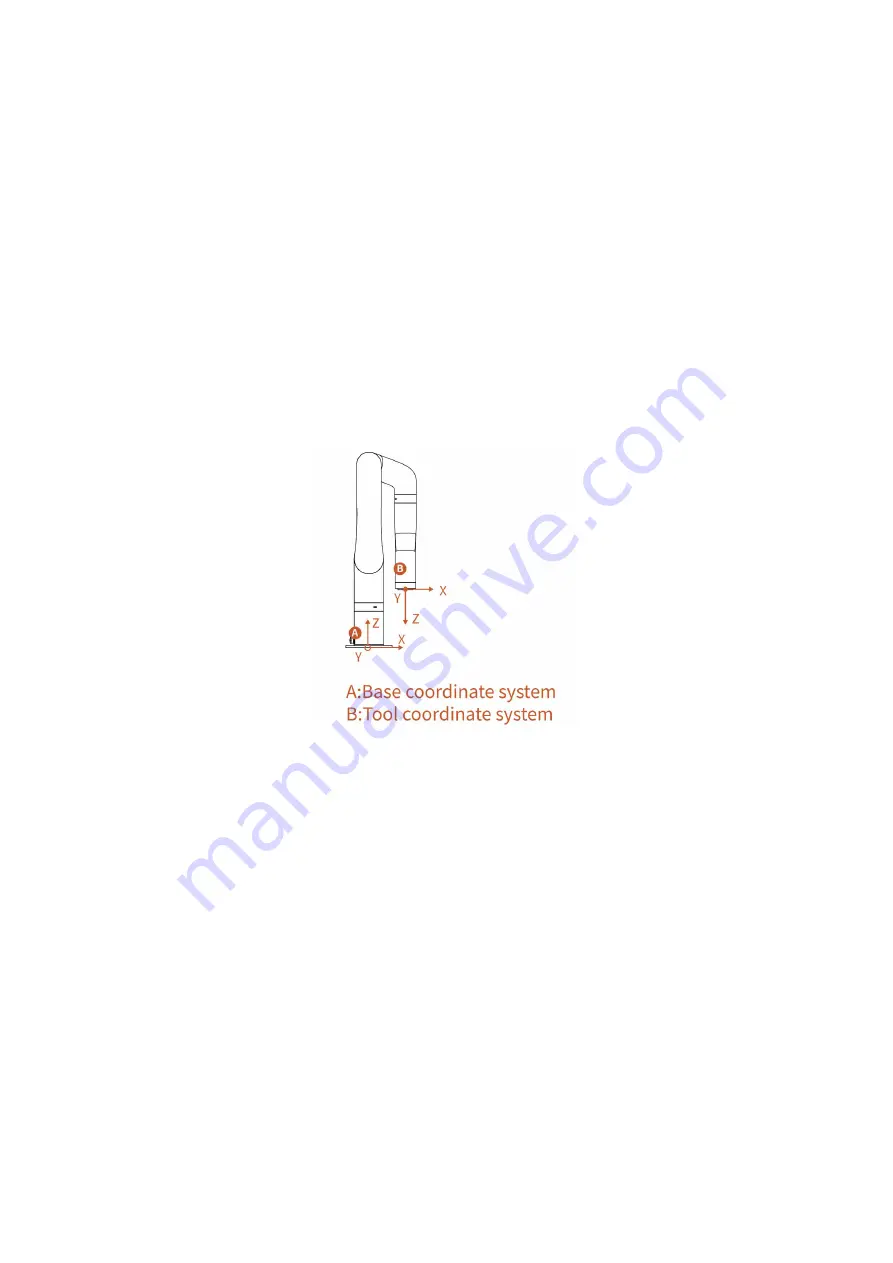
1.5.3.2 TCP Coordinate System
The default TCP coordinate system is defined at the centre point of the
end flange of the robotic arm, and it is the result of rotating [180°, 0°, 0°]
around the X/Y/Z-axis of the base coordinate system in order. The
spatial orientation of the TCP coordinate system changes according to
the changes of the joint angles.
●
Roll/Pitch/Yaw respectively rotates around X/Y/Z of the base
coordinate system, and the final TCP orientation is the result of the
three rotations in exact order. The robotic arm will always choose
Содержание 850
Страница 1: ...1...
Страница 72: ...72 4 The control box PC and network switch are connected by Ethernet ca ble...
Страница 74: ...74 Step3 Open the Properties Step4 Open the IPV4...
Страница 89: ...89 Cancel Cancel the selection Save Save the modified data Discard Discard the modified data...
Страница 145: ...145 1 6 6 GPIO Control Box and End tool interface...
Страница 149: ...149 1 6 7 End Effector...
Страница 197: ...197 State 6 Stop Generally use studio will generate state 6 and state 6 is also a kind of stop...







































































