





























51
separate branches. A single I/O failure should not result in the loss of
safety features. There are two fixed safety inputs:
•
The robotic arm emergency stop input is only used for the emergency
stop of the device.
•
The protective stop input is used for all types of safety protection.
The functional differences are as follows.
Emergency Stop
Protective Stop
Stops the motion of the robotic
Yes
Yes
Program execution
Stop
Suspend
Reset
Manual
Auto or manual
Usage frequency
Not frequent
No limit
Need re-initiation
Only releasing the brake
No
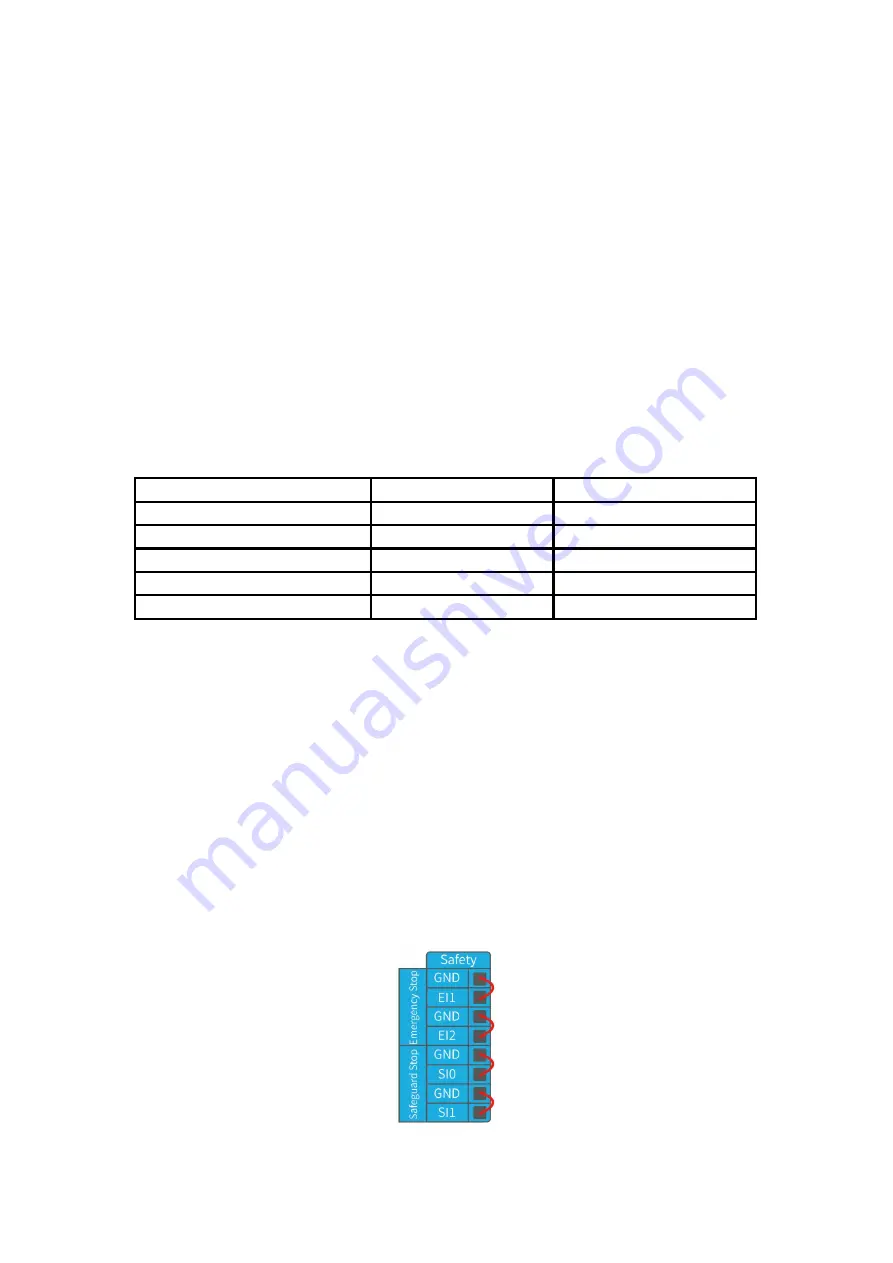
2.4.2.1.
Default Safety Configuration
The robotic arm has been configured by default and can be operated
without any additional safety equipment, as the figure below. If there is
a problem with the robotic arm, please check the following figure for the
correct connection.
Содержание 850
Страница 1: ...1...
Страница 72: ...72 4 The control box PC and network switch are connected by Ethernet ca ble...
Страница 74: ...74 Step3 Open the Properties Step4 Open the IPV4...
Страница 89: ...89 Cancel Cancel the selection Save Save the modified data Discard Discard the modified data...
Страница 145: ...145 1 6 6 GPIO Control Box and End tool interface...
Страница 149: ...149 1 6 7 End Effector...
Страница 197: ...197 State 6 Stop Generally use studio will generate state 6 and state 6 is also a kind of stop...







































































