





























Setpoint channel and closed-loop control
7.4 Vector speed/torque control with/without encoder
Converter cabinet units
452
Operating Instructions, 07/2016, A5E03347396A
The ramp-up and ramp-down times should always be set to values larger than the startup
time.
Note
Setting the ramp-function generator
The ramp-up and ramp-down times (p1120; p1121) of the ramp-function generator in the
setpoint channel should be set accordingly so that the motor speed can track the setpoint
during acceleration and braking. This will optimize the function of speed controller pre-
control.
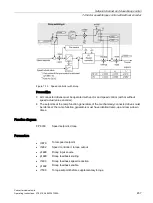
Acceleration pre-control using a connector input (p1495) is activated by the parameter
settings p1400.2 = 1 and p1400.3 = 0. p1428 (dead time) and p1429 (time constant) can be
set for balancing purposes.
Function diagram
FP 6031
Precontrol balancing reference/acceleration model
Parameter
•
p0311
Rated motor speed
•
r0333
Rated motor torque
•
p0341
Motor moment of inertia
•
p0342
Ratio between the total and motor moment of inertia
•
r0345
Rated motor startup time
•
p1400.2 Acceleration pre-control source
•
p1428
Speed pre-control balancing dead time
•
p1429
Speed pre-control balancing time constant
•
p1496
Acceleration pre-control scaling
•
r1518
Acceleration torque
7.4.4.2
Reference model
Description
The reference model is activated with p1400.3 = 1.
The reference model is used to emulate the speed control loop with a P speed controller.
The loop emulation can be set in p1433 to p1435. It becomes effective if p1437 is connected
to the output of the model r1436.
Содержание SINAMICS G150
Страница 1: ......
Страница 2: ......
Страница 8: ...Foreword Converter cabinet units 8 Operating Instructions 07 2016 A5E03347396A ...
Страница 18: ...Table of contents Converter cabinet units 18 Operating Instructions 07 2016 A5E03347396A ...
Страница 38: ...Device overview 2 5 Type plate Converter cabinet units 38 Operating Instructions 07 2016 A5E03347396A ...
Страница 679: ......
Страница 680: ......







































































