





























5 POSITIONING CONTROL
5.17 Continuous Trajectory Control
355
5
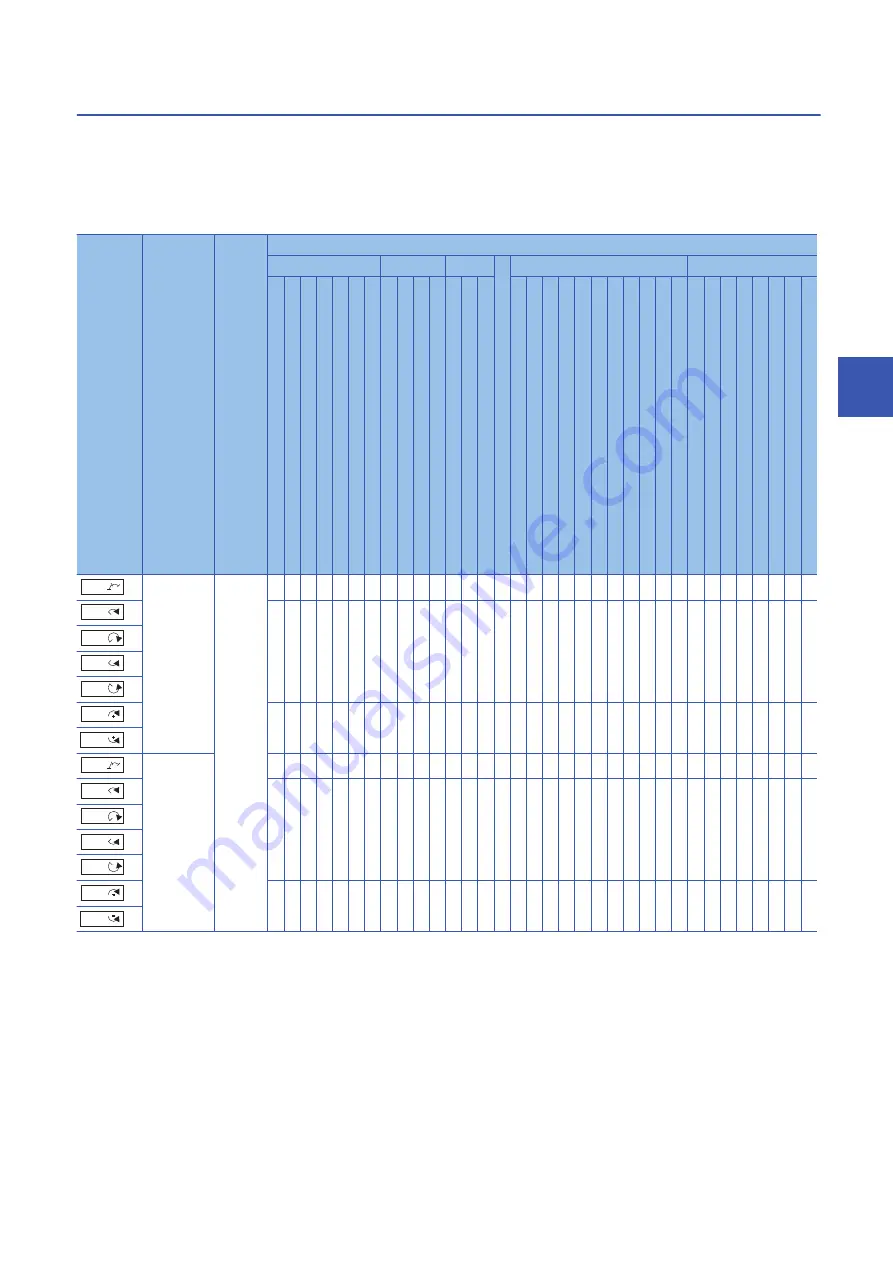
Continuous trajectory control for helical interpolation
The helical interpolation can be specified as the positioning control method to pass point for 3 or 4 axes continuous trajectory
control.
Starting or ending instruction for continuous trajectory control uses the same CPSTART3, CPSTART4 or CPEND as 3 or 4
axes continuous trajectory control instruction.
: Must be set,
: Set if required
*1 Only when the reference axis speed is specified
ABH
ABH
ABH
ABH
ABH
ABH
ABH
INH
INH
INH
INH
INH
INH
INH
Positioning data set in servo instructions
Common
Servo
instruction
Positioning
method
Number
of
control
axes
Arc
OSC
Parameter block
Others
Parameter block No.
Acceleration time
Deceleration time
Rapid Stop deceleration time
Torque limit value
Deceleration processing on stop input
Allowable error range for circular interpolation
S-curve ratio
Advanced S-curve acceleration/deceleration
Bias speed at start
Repeat condition
Program No.
Command speed (Continuous trajectory)
Skip
FIN acceleration/deceleration
WAIT-ON/OFF
Fixed position stop
Axis
Address/travel value
Command speed
Dwell time
M-code
Torque limit value
Auxiliary point
Radius
Central point
Number of pitches
Starting angle
Amplitude
Frequency
Interpolation control unit
Speed limit value
Reference axis No.
*1
Fixed position stop acceleration/deceleration time
Absolute
Incremental
2
© ©
© ©
© ©
© ©
© ©
© ©
© ©
©
© ©
©
© ©
©
© ©
©
© ©
©
© ©
©
¨ ¨
¨
¨
¨
¨
¨
¨
¨
¨
¨
¨
¨
¨
¨ ¨
¨ ¨
¨ ¨
¨ ¨
¨ ¨
Содержание MELSEC iQ-R16MTCPU
Страница 1: ...MELSEC iQ R Motion Controller Programming Manual Positioning Control R16MTCPU R32MTCPU R64MTCPU ...
Страница 2: ......
Страница 477: ...APPENDICES Appendix 1 Processing Times of the Motion CPU 475 A MEMO ...
Страница 481: ......







































































