





























400
5 POSITIONING CONTROL
5.21 Home Position Return
Home position return by the dogless home position signal
reference method
Dogless home position signal reference method
Home position return is executed using home position signal (zero point). This is a home position return method that does not
use proximity dogs.
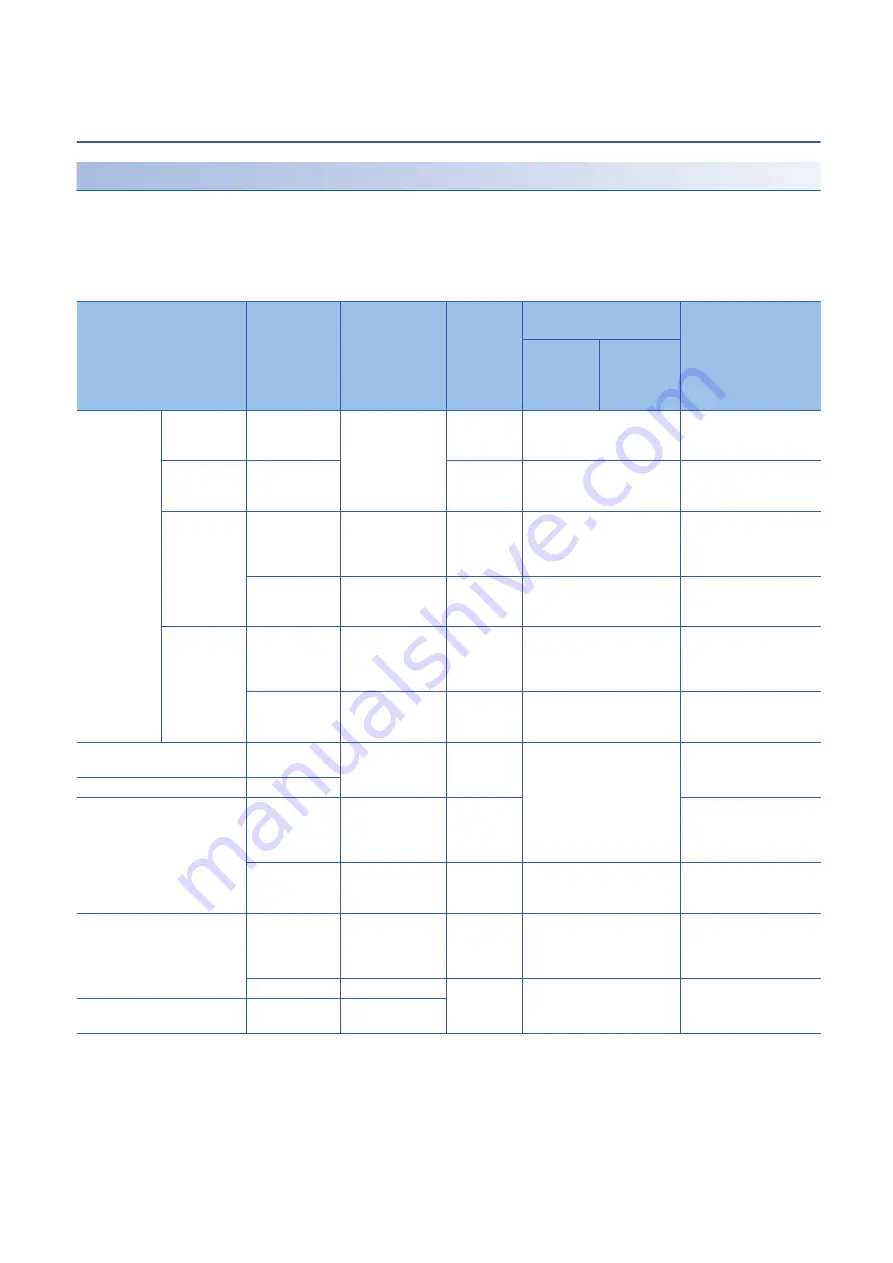
Home position, home position return operation, home position return data (home position return retry function, dwell time at
the home position return retry) differ by the servo amplifier connected as shown below.
Also, set the servo parameter "Function selection C-4 (PC17) (Selection of home position setting condition)" as follows.
*1 For the home position return operations, refer to home position return by the dogless home position signal reference method.
• Operation A (
• Operation B (
• Operation C (
*2 During semi closed loop control is equivalent to MR-J3-
B and MR-J4-
B (standard).
Servo amplifier model
Linear
encoder type
Home position
Home
position
return
operation
Home position return
data
servo parameter
"Function selection C-
4 (PC17)
(Selection of home
position setting
condition)"
Home
position
return retry
function
Dwell time
at the home
position
return retry
MR-J4-
B
MR-J4W-
B
MR-J4-
B-RJ
MR-J4-
B-LL
Standard
Home position
signal (zero point)
Operation B
Invalid
1: Not need to pass motor
Z phase after the power
supply is switched on.
Direct drive
motor
Operation A
Valid
0: Need to pass motor Z
phase after the power
supply is switched on.
Linear servo
Absolute position
type
Position where
address of absolute
linear encoder
becomes 0.
Operation C
Invalid
Both
Incremental type
Reference mark
Operation A
Valid
0: Need to pass motor Z
phase after the power
supply is switched on.
Fully closed
loop control
Absolute position
type
Position where
address of absolute
linear encoder
becomes 0.
Operation C
Invalid
Both
Incremental type
Reference mark
Operation A
Valid
0: Need to pass motor Z
phase after the power
supply is switched on.
MR-J3-
B
MR-J3-
B Safety
Home position
signal (zero point)
Operation B
Invalid
1: Not need to pass motor
Z phase after the power
supply is switched on.
MR-J3W-
B
MR-J3-
B-RJ004
MR-J3-
B Safety
Absolute position
type
Position where
address of absolute
linear encoder
becomes 0.
Operation C
Both
Incremental type
Reference mark
Operation A
Valid
0: Need to pass motor Z
phase after the power
supply is switched on.
MR-J3-
MR-J3-
B Safety
Absolute position
type
Position where
address of absolute
linear encoder
becomes 0.
Operation C
Invalid
Both
Incremental type
Reference mark
Operation A
Valid
0: Need to pass motor Z
phase after the power
supply is switched on.
MR-J3-
B-RJ080W
Home position
signal (zero point)
Содержание MELSEC iQ-R16MTCPU
Страница 1: ...MELSEC iQ R Motion Controller Programming Manual Positioning Control R16MTCPU R32MTCPU R64MTCPU ...
Страница 2: ......
Страница 477: ...APPENDICES Appendix 1 Processing Times of the Motion CPU 475 A MEMO ...
Страница 481: ......







































































